







 本文详细介绍了如何搭建ES7.6.1,包括下载安装、配置解决Head插件跨域问题,安装并启动Kibana,以及安装IK分词器进行中文分词。同时,提供了IK分词器的配置教程和ES+Springboot API操作的资源链接。
本文详细介绍了如何搭建ES7.6.1,包括下载安装、配置解决Head插件跨域问题,安装并启动Kibana,以及安装IK分词器进行中文分词。同时,提供了IK分词器的配置教程和ES+Springboot API操作的资源链接。
一、ES7.6.1安装
1.下载地址:https://www.elastic.co/cn/downloads/elasticsearch
2.解压
进入config目录,修改配置文件
文末加上解决head插件跨域问题配置:
http.cors.enabled: true
http.cors.allow-origin: "*"
3.下载head
下载地址:https://github.com/mobz/elasticsearch-head/
确保已经安装node.js
4.解压head
5.进入ES安装目录下bin文件夹,启动ES
6.启动Head
进入head文件夹目录,打开命令窗口
执行命令
cnpm install
cnpm start run7.访问Head管理界面localhost:9100

8.安装Kibana
官网:https://www.elastic.co/cn/kibana
Kibana 版本要和 Es 一致!
下载后解压,解压时间较长,
修改汉化:
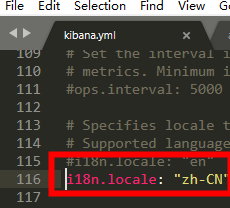
保存,关闭
进入bin目录启动kibana
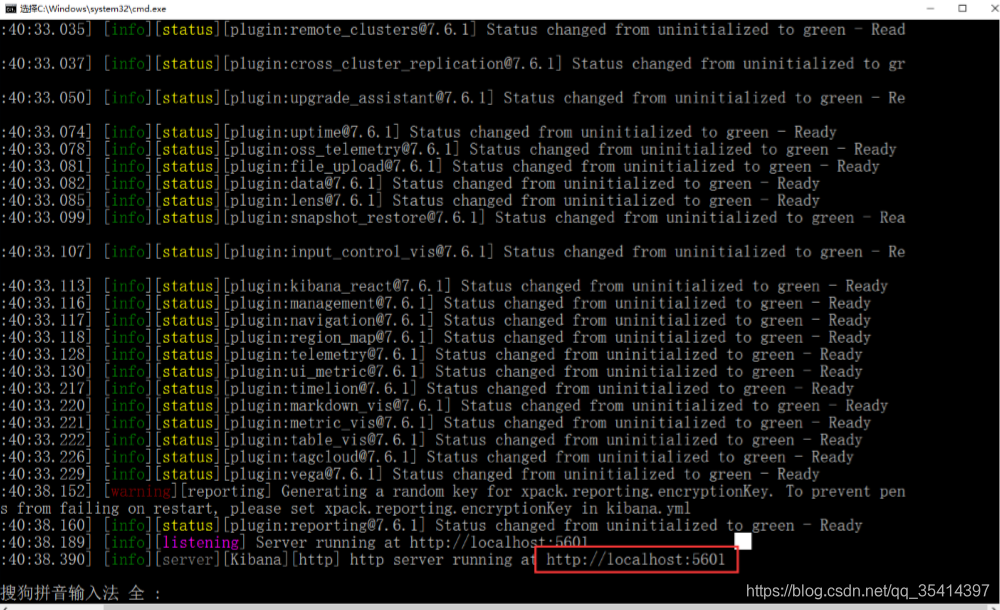
9.访问Kibana http://localhost:5601
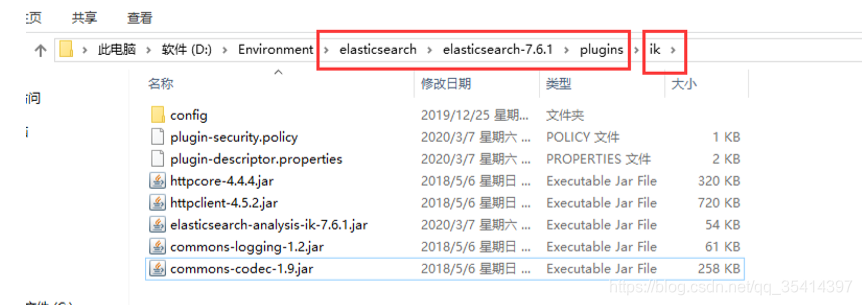
10.安装IK分词器
下载地址:https://github.com/medcl/elasticsearch-analysis-ik
下载完毕之后,放入到我们的elasticsearch 插件即可!
11.、重启观察ES,可以看到ik分词器被加载了!
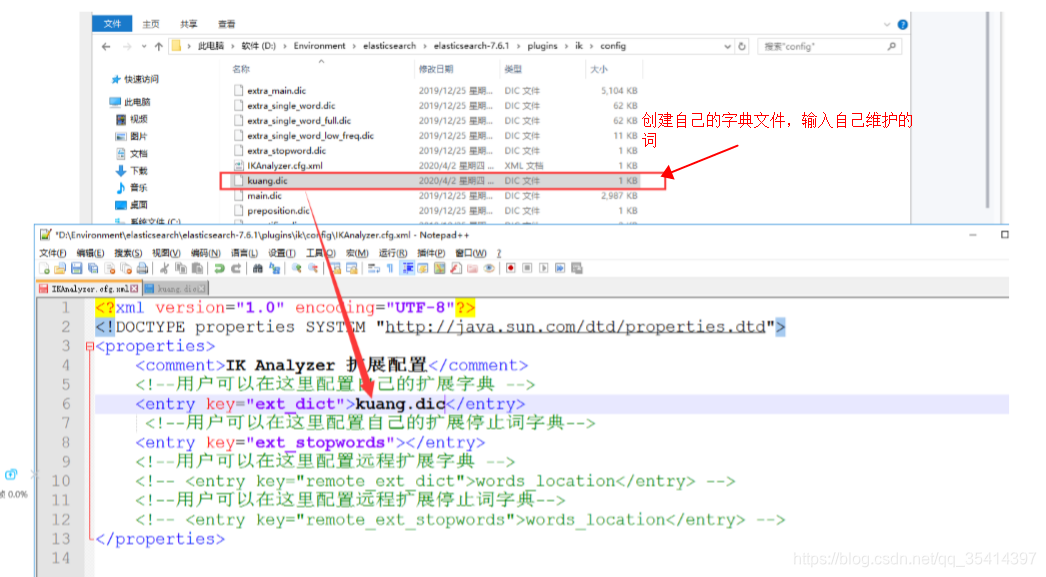
12.ik 分词器增加自己的配置
13.Kibana及IK相关操作:
链接:https://pan.baidu.com/s/1hq8lnLKWX7BOBCkZNx6VEw
提取码:v4ox
14.ES+Springboot API操作
pom文件:
<?xml version="1.0" encoding="UTF-8"?>
<project xmlns="http://ma 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









