







 本文详细介绍了在Ubuntu上安装ROS kinetic完整版时遇到的依赖问题及解决方案,包括使用aptitude替代apt-get进行安装,以及更改软件源来解决安装错误。
本文详细介绍了在Ubuntu上安装ROS kinetic完整版时遇到的依赖问题及解决方案,包括使用aptitude替代apt-get进行安装,以及更改软件源来解决安装错误。
1、设置软件源
2、设置Ubuntu的sources.list
在命令终端输入:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3、设置key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
4、更新package
sudo apt-get update
5、ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full
接下去终端显示安装错误,错误提示如下
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
ros-kinetic-desktop-full : Depends: ros-kinetic-desktop but it is not going to be installed
Depends: ros-kinetic-perception but it is not going to be installed
Depends: ros-kinetic-simulators but it is not going to be installed
Depends: ros-kinetic-urdf-tutorial but it is not going to be installed
E: Unable to correct problems, you have held broken packages.
解决方法1:
安装ROS命令换成:
sudo aptitude install ros-kinetic-desktop-full
若出现 aptitude:command not found提示则需要在安装ROS命令之前先装aptitude
在终端输入:sudo apt-get aptitude ,安装完aptitude,在接着执行sudo aptitude install ros-kinetic-desktop-full命令
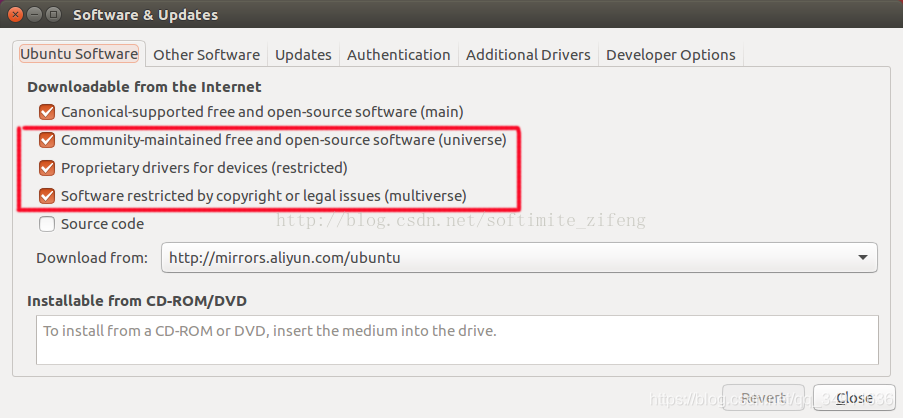
解决方法2:如方法1安装aptitude显示无法安装的信息时,尝试更改软件的安装源,如下所示
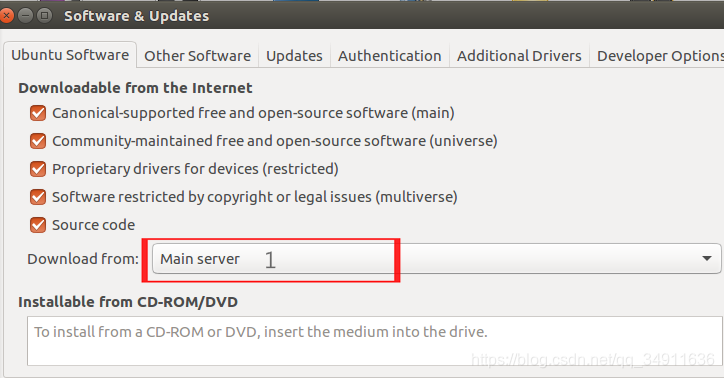
更改软件源之后再重新尝试sudo apt-get install ros-kinetic-desktop-full安装命令

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









