import numpy as np
import matplotlib.pyplot as plt
from pymoo.core.problem import ElementwiseProblem
from pymoo.algorithms.moo.nsga2 import NSGA2
from pymoo.termination import get_termination
from pymoo.optimize import minimize
def multiobj_sustainable_tourism():
"""
多目标优化示例:可持续旅游 (Python + pymoo)
对标 MATLAB gamultiobj 示例。
"""
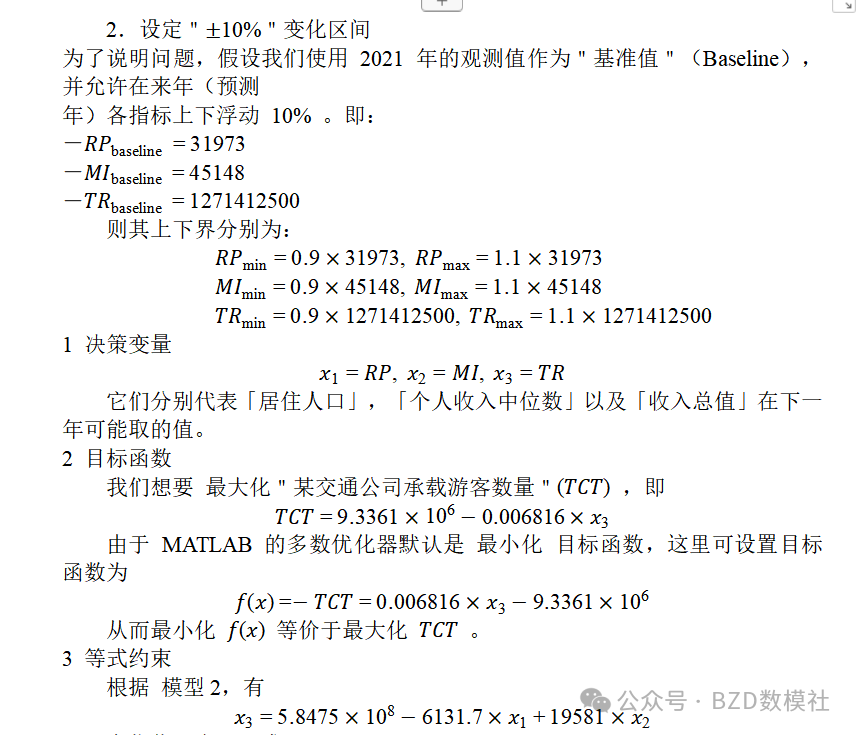
# 1. 定义基准值 (以 2021 年为例)
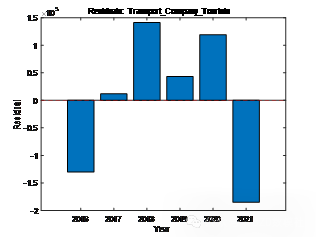
RP_baseline = 31973.0 # 居住人口
MI_baseline = 45148.0 # 个人收入中位数
TR_baseline = 1271412500.0 # 收入总值
lb = np.array([0.9*RP_baseline, 0.9*MI_baseline, 0.9*TR_baseline])
ub = np.array([1.1*RP_baseline, 1.1*MI_baseline, 1.1*TR_baseline])
# 2. 定义多目标问题 (继承自 ElementwiseProblem)
class TourismProblem(ElementwiseProblem):
def __init__(self):
super().__init__(
n_var=3, # 决策变量维度
n_obj=2, # 目标函数个数
n_ieq_constr=0, # 不等式约束个数
n_eq_constr=1, # 等式约束个数
xl=lb, # 决策变量下界
xu=ub, # 决策变量上界
type_var=np.float64
)
# 一些基准值放这里,便于在 _evaluate 中调用
self.TR_baseline = TR_baseline
self.baselineEnv = 100.0
self.alpha = 1e-9
def _evaluate(self, x, out, *args, **kwargs):
"""
x: [RP, MI, TR]
目标1: f1 = 0.006816 * TR - 9.3361e+06 (相当于 -TCT, 需要最小化)
目标2: f2 = 100 + 1e-9*(TR - TR_baseline) (环境影响)
约束: TR - [5.8475e+08 - 6131.7*RP + 19581*MI] = 0
"""
RP, MI, TR = x[0], x[1], x[2]
# ---- 目标函数 ----
f1 = 0.006816 * TR - 9.3361e+06
f2 = self.baselineEnv + self.alpha*(TR - self.TR_baseline)
# ---- 等式约束 (h = 0) ----
# TR - (5.8475e+08 - 6131.7*RP + 19581*MI) = 0
model2_val = 5.8475e+08 - 6131.7*RP + 19581.0*MI
h = TR - model2_val
# 给 pymoo 输出
out["F"] = [f1, f2] # 两个目标
out["H"] = [h] # 1 个等式约束
# 初始化问题
problem = TourismProblem()
# 3. 设置算法参数,相当于 gamultiobj 的选项
algorithm = NSGA2(
pop_size=100, # 种群规模
# 可根据需要增加其他参数设置
)
# 4. 设置终止准则 (最大迭代代数)
termination = get_termination("n_gen", 100)
# 5. 开始优化
res = minimize(
problem,
algorithm,
termination,
seed=1,
save_history=True,
verbose=True # 在控制台输出迭代信息
)
# 6. 结果分析
X = res.X # 帕累托前沿上的决策变量集合 (可能有多行)
F = res.F # 对应的目标函数值 [f1, f2]
print("=== 帕累托解 (局部查看) ===")
for i in range(len(X)):
RP_sol, MI_sol, TR_sol = X[i]
f1_val, f2_val = F[i]
print(f"Solution {i+1}: RP={RP_sol:.2f}, MI={MI_sol:.2f}, TR={TR_sol:.2f}, "
f"Obj1={f1_val:.2f}, Obj2={f2_val:.6f}")
print(f"\nExit message: {res.algorithm.verbose}")
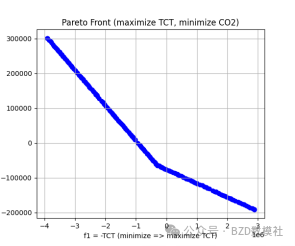
# 7. 绘制帕累托前沿
# f1 在横轴,f2 在纵轴
plt.figure(figsize=(6,5))
plt.scatter(F[:, 0], F[:, 1], c='red', marker='o')
plt.xlabel('f1 = 0.006816*TR - 9.3361e+06 (minimize)')
plt.ylabel('f2 = EnvImpact (minimize)')
plt.title('Pareto Front (NSGA2 Result)')
plt.grid(True)
plt.show()
# 入口
if __name__ == "__main__":
multiobj_sustainable_tourism()
























 1799
1799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









