







 本文介绍如何使用Roboware Studio(ROSIDE)创建ROS工作空间并编写控制节点,以实现PX4飞行器的高度控制。文章详细展示了从安装ROSIDE、创建节点到通过jMAVSim进行仿真的全过程。
本文介绍如何使用Roboware Studio(ROSIDE)创建ROS工作空间并编写控制节点,以实现PX4飞行器的高度控制。文章详细展示了从安装ROSIDE、创建节点到通过jMAVSim进行仿真的全过程。
1.安装ROS IDE:
Roboware Studio(只支持linux),网址:http://www.roboware.me
Roboware可以很方便的创建工作空间,编写程序后可以自动更新CmakeLists文件,将节点加入工作空间中。
2.创建工作空间,编写相应节点
Roboware有相应的指导手册,根据手册说明,正常创建就可以,没有太多需要注意的地方。
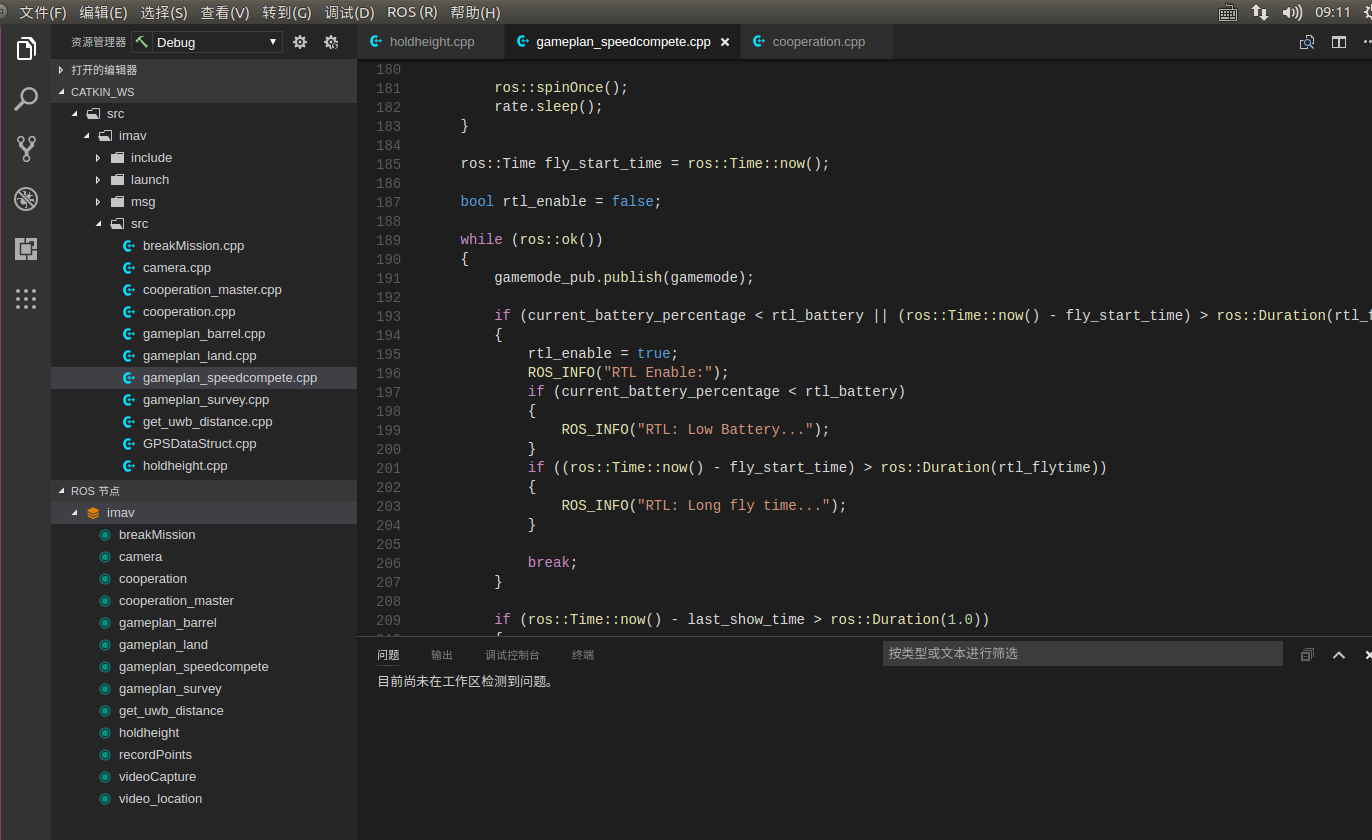
上图的cpp文件经过编译后会在下方imav工作空间中自动生成相应的节点。
3.以PX4高度控制为例
在让飞机真正飞行前一般都要在系统上进行仿真测试,仿真软件主要有两种:jMAVSim和gazebo
笔者这里主要使用第一种,运行jMAVSim无需进行额外的环境配置,在对应的程序安装位置,启动程序即可打开。
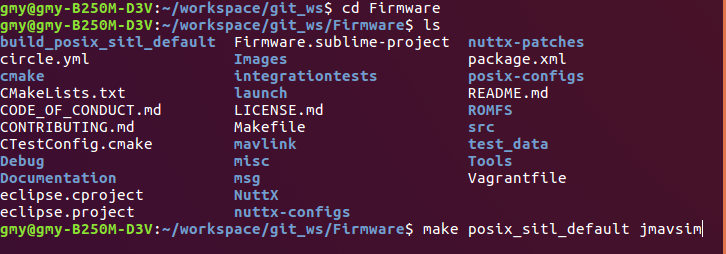
cd Firmware
make posix_sitl_default jmavsim
接下来进入PX4地面站的安装目录,打开QG
cd qgroundcontrol/
./qgroundcontrol-start.sh
进入QG
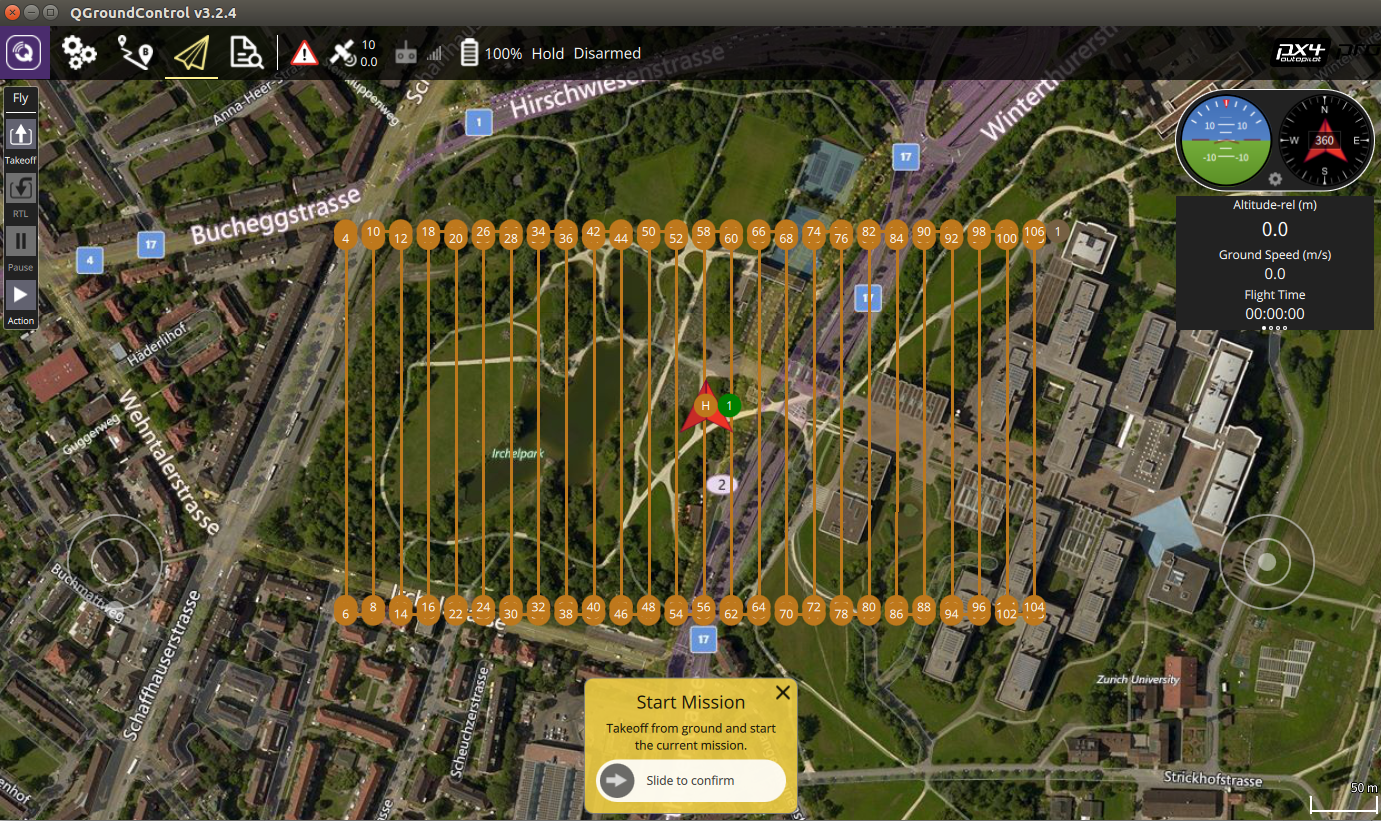
当在地面站中将飞机起飞后,再切到offboard模式,仿真器中的飞机就会开始执行编写的节点,具体操作如下:
运行mavros
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"运行任务节点(roslaunch中已经包含roscore,无需运行)
rosrun imav holdheight

如图所示,切到offboard后,飞机执行任务节点,在2m悬停。

















 1359
1359

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









