







 本文探讨了计算几何中的最接近点对问题,通过分治法进行求解。首先介绍了直观解法的时间复杂度,然后详细阐述了分治法的策略,包括一维和二维情况下的解决方案。在一维问题中,通过选取中位数分割点,合并步骤可以在O(n)时间内完成。二维问题中,利用垂直平分线和矩形R的稀疏性质,将检查的候选者数量限制在3n个。最后,通过投影和排序优化合并步骤,提高效率。
本文探讨了计算几何中的最接近点对问题,通过分治法进行求解。首先介绍了直观解法的时间复杂度,然后详细阐述了分治法的策略,包括一维和二维情况下的解决方案。在一维问题中,通过选取中位数分割点,合并步骤可以在O(n)时间内完成。二维问题中,利用垂直平分线和矩形R的稀疏性质,将检查的候选者数量限制在3n个。最后,通过投影和排序优化合并步骤,提高效率。
背景:
计算机应用中经常采用点、圆等简单的几何对象表示物理实体,常需要了解其邻域中其他几何对象的信息
- 例如:在空中交通控制中,若将飞机作为空间中的一个点来处理,则具有最大碰撞危险的两架飞机所处的点对,就是这个空间中距离最接近的一对点。
这类问题是计算几何学中研究的基本问题之一。
我们着重考虑平面上的最接近点对问题。
最接近点对问题:
给定平面上的n个点,找出其中的一对点,使得在n个点组成的所有点对中,该点对的距离最小。
直观解法:
- 将每一个点与其他n-1个点的距离算出,找出最小距离。
- 时间复杂度:T(n)=n(n-1)/2+n=O(n2),ps:求出n(n-1)/2个点对距离的时间+求出最短距离的时间
分治法:
- 分解:将n个点的集合分成大小近似相等的两个子集。
- 求解:递归地求解两个子集内部的最接近点对。
- 合并(关键问题):从子空间内部最接近点对,和两个子空间之间的最接近点对中,选择最接近点对。
1、一维最接近点对问题
算法思路:
考虑将所给的n个点的集合S分成2个子集S1和S2,每个子集中约有n/2个点,然后在每个子集中递归地求其最接近的点对。
关键的问题是分治法中的合并步骤:
- 由S1和S2的最接近点对,还要求得原集合S中的最接近点对,因为S1和S2的最接近点对未必就是S的最接近点对。
- 如果这2个点分别在S1和S2中,则对于S1中任一点p,S2中最多只有n/2个点与它构成最接近点对的候选者。
- 仍需做n^2/4(n/2*n/2)次计算和比较才能确定S的最接近点对。
- 合并步骤耗时为O(n^2),整个算法所需计算时间T(n)应满足: T(n)=2T(n/2)+O(n^2)。
- 因此,问题出在合并步骤耗时太多。
用x轴上某个点m将S划分为2个子集S1和S2,使得S1={x∈S|x≤m};S2={x∈S|x>m}。
因此,所有p∈S1和q∈S2有p<q,递归地在S1和S2上找出其最接近点对{p1,p2}和{q1,q2},并设d=min{|p1-p2|,|q1-q2|}。
S中的最接近点对或者是{p1,p2},或者是{q1,q2},或者是某个{p3,q3},其中p3∈S1且q3∈S2。
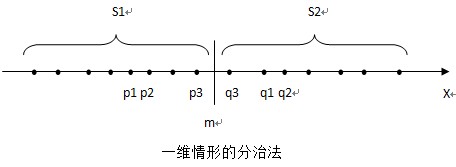
如果S的最接近点对是{p3,q3},即|p3-q3|<d,则p3和q3两者与m的距离不超过d,即|p3-m|<d,|q3-m|<d。
可得,p3∈(m-d,m],q3∈(m,m+d]。
由于在S1中,每个长度为d的半闭区间至多包含一个点(否则必有两点距离小于d)。
并且m是S1和S2的分割点,因此(m-d,m]中至多包含S中的一个点,且为S1中最大点。
同理,(m,m+d]中也至多包含S中的一个点,且为S2中最小点。
因此,我们用线性时间就能找到区间(m-d,m]和(m,m+d]中所有点,即p3和q3。
按这种分治策略,合并步可在O(n)时间内完成。
还需考虑的一个问题:分割点m的选取,及S1和S2的划分。
- 选取分割点m的一个基本要求是由此导出集合S的一个线性分割。
- 即S=S1∪S2 ,S1∩S2=Φ,且S1={x|x≤m};S2={x|x>m}。
- 容易看出,如果选取m=[max(S)+min(S)]/2,可以满足线性分割的要求。
- 选取分割点后,再用O(n)时间即可将S划分成S1={x∈S|x≤m}和S2={x∈S|x>m}。
划分可能出现的问题:造成划分出的子集S1和S2的不平衡
- 例如在最坏情况下,|S1|=1,|S2|=n-1。
- 由此,产生的最坏情况下所需的计算时间T(n)=T(n-1)+O(n)。
- 该递归方程的解为:T(n)=O(n^2)
- 可用分治法中“平衡子问题”的方法来解决,如用S的n个点的坐标的中位数来作分割点。
- 用选取中位数的线性时间算法,可在O(n)时间内确定一个平衡的分割点m。
确定平衡点采用m=[max(S)+min(S)]/2的方法,程序如下:
#include <ctime>
#include <iostream>
using namespace std;
//点对结构体
struct Pair {
float d;//点对距离
float d1, d2;//点对坐标
};
float Max(float s[], int p, int q);
float Min(float s[], int p, int q);
template<class Type>
void Swap(Type &x, Type &y);
template<class Type>
int Partition(Type s[], Type x, int l, int r);
Pair Cpair(float s[], int l, int r);
int main()  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









