



 本文介绍了如何使用分治策略解决一维和二维最接近点对问题,包括一维问题的简单处理和二维问题中跨边界归并的解决方案,以及利用鸽舍原理优化查找过程。
本文介绍了如何使用分治策略解决一维和二维最接近点对问题,包括一维问题的简单处理和二维问题中跨边界归并的解决方案,以及利用鸽舍原理优化查找过程。
问题描述
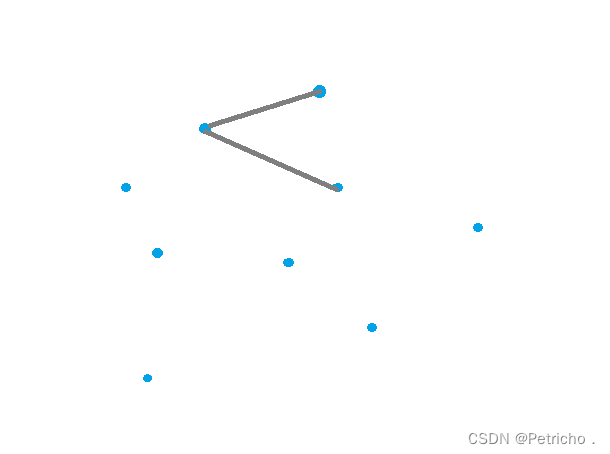
在现实世界中,涉及点、圆等几何对象的问题,往往需要了解邻域中其他几何对象的信息。如,判断空中飞行的两架飞机是否有碰撞危险,我们可以将飞机近似为点,它们的最小安全距离就是我们的求解目标,这类问题在计算几何学中被称为最接近点对问题。
当然,我们可以通过遍历的方式来解决这类问题:依次求出平面上散落点两两之间的距离,通过排序找到最近接点对。
这样有个明显的问题:算法的时间复杂度,为了提高计算效率,考虑通过分治法解决问题。
一维最接近点对问题
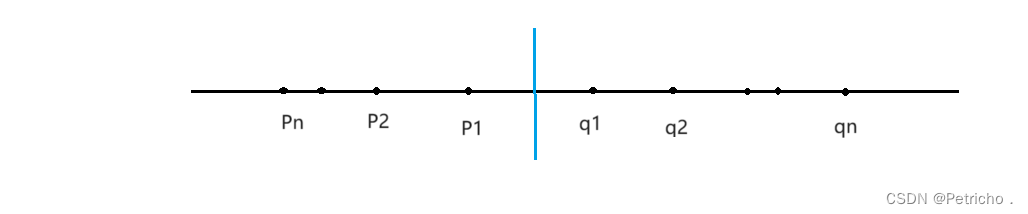
一维最接近点对问题的解决很简单,利用分治策略将点集S划分,求出最邻近点对后逐步合并。当问题规模为n/2时,也就是S被划分为两个子集p和q,并找到其各自的最小点对时无需再将问题合并,只用比较分界线两侧的点距和,较小值即为所求的最接近点对。
核心代码如下:
Pair Cpair(float s[],int l,int r)
{
Pair min_d={99999,0,0};//最短距离
if(r-l<1) return min_d;
float m1=Max(s,l,r),m2=Min(s,l,r);
float m=(m1+m2)/2;//找出点集中的中位数
//将点集中的各元素按与m的大小关系分组
int j = Partition(s,m,l,r);
Pair d1=Cpair(s,l,j),d2=Cpair(s,j+1,r);//递归
float p=Max(s,l,j),q=Min(s,j+1,r);
//返回s[]中的具有最近距离的点对及其距离
if(d1.d<d2.d)
{
if((q-p)<d1.d)
{
min_d.d=(q-p);
min_d.d1=q;
min_d.d2=p;
return min_d;
}
else return d1;
}
else
{
if((q-p)<d2.d)
{
min_d.d=(q-p);
min_d.d1=q;
min_d.d2=p;
return min_d;
}
else return d2;
}
} 二维最接近点对问题
现在将一维问题拓展,思考寻找平面上最接近点对。
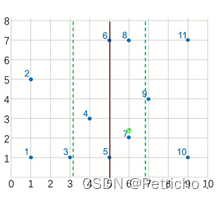
大部分操作同一维问题,重难点在于“跨越分界线”归并问题。令,若存在跨越界线的最接近点对,则这两个点一定落在以分界线为中线,
的矩形区域内;由鸽舍定理,这个矩形区域内最多只存在6个点。那具体是哪6个点呢?为了解决这个问题,我们可以将p和P中所有S2的点投影到垂直线l上。由于能与p点一起构成最接近点对候选者的S2中点一定在矩形R中,所以它们在直线l上的投影点距p在l上投影点的距离小于d。由上面的分析可知,这种投影点最多只有6个。因此,若将q和p中所有S的点按其y坐标排好序,则对q中所有点,对排好序的点列作一次扫描,就可以找出所有最接近点对的候选者,对q中每一点最多只要检查p中排好序的相继6个点。
具体算法如下:
bool Cpair2(PointX X[], int n,PointX& a,PointX& b,float& d)
{
if(n<2) return false;
PointX* tmpX = new PointX[n];
MergeSort(X,tmpX,0,n-1);
PointY* Y=new PointY[n];
for(int i=0;i<n;i++) //将数组X中的点复制到数组Y中
{
Y[i].p=i;
Y[i].x=X[i].x;
Y[i].y=X[i].y;
}
PointY* tmpY = new PointY[n];
MergeSort(Y,tmpY,0,n-1);
PointY* Z=new PointY[n];
closest(X,Y,Z,0,n-1,a,b,d);
delete []Y;
delete []Z;
delete []tmpX;
delete []tmpY;
return true;
} 小结
以上就是最接近点对问题的分析和解决思路。附鸽舍原理推导过程链接:
 https://zhuanlan.zhihu.com/p/588737795
https://zhuanlan.zhihu.com/p/588737795
















 3464
3464

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









