






1 代码地址
https://github.com/RMonica/rviz_cloud_annotation
2 安装
2.1 安装ROS-Kinetic
参考:https://github.com/halostorm/PCAT_open_source
2.2 安装软件
在home 文件夹下建立文件夹catkin_ws
在catkin_ws文件夹下创建文件夹src
在catkin_ws中打开终端
执行命令:catkin_make
将github中的两个文件夹
拷到src文件夹下
在catkin_ws文件夹下打开终端
执行命令:catkin_make
3使用软件
参考
PCAT视频教程:https://github.com/halostorm/PCAT_open_source
以标注447.pcd为例
将未标注的447.pcd文件拷贝到
/home/simon/catkin_ws/src/rviz_cloud_annotation/data文件夹下,在data目录下创建同名文件夹447,将447.pcd重命名为example.pcd,替换同名文件
执行命令:source ~/catkin_ws/devel/setup.bash
和roslaunch rviz_cloud_annotation example.launch启动标注软件
使用快捷键shift+o增大点的显示大小,让点云可见
如图:
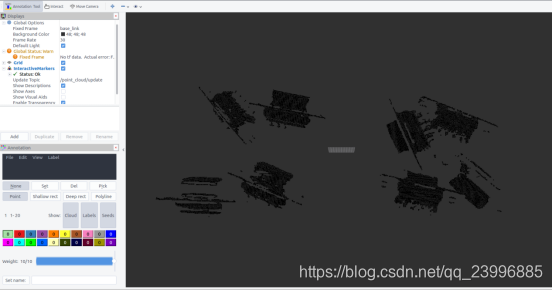
可以在左上角的 background color 中选择合适的颜色:

界面解释:
none为移动点云模式,set为标注模式,del为删除模式
Point为选择点进行标注;Shallow rect和Deep rect为使用矩形进行标注,同时Deep rect会将矩形景深内所有的点进行选择,而shallow rect只会将一定的景深内的点进行选择,一般只需要使用deep rect 方式;polyline使用多边形标注,只会将一定的景深内的点进行选择。
如下所示:

Show:后面的为是否显示,一般设置如下
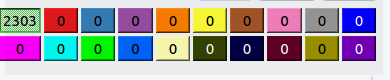
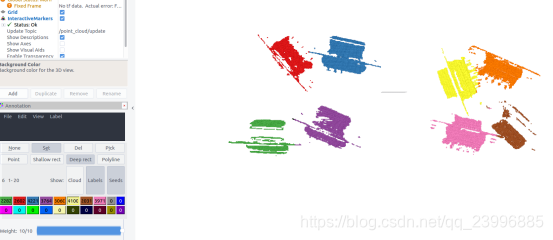
颜色对应每个点的标号,从左到右依次是 1,2…10 下一行是11…20,如果使用某种颜色标记了点云,会显示点的个数,如下图:标记的时候每个实例按照数字从小到大依次标记
显示使用参照
标记完成之后:如图
点击File-Save,关闭软件,对话框选择save,
在路径:/home/simon/catkin_ws/src/rviz_cloud_annotation/data
下生成了三个文件:example.ann example.txt example_annotated.pcd
将以example开头的四个文件剪切到以447文件夹下,447.pcd标注完成,447文件夹包含了未标注的447.pcd和标注文件
同理,对其他*.pcd 文件进行标注,标注结果保存在以与各个文件名同名的文件夹下

















 3398
3398

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









