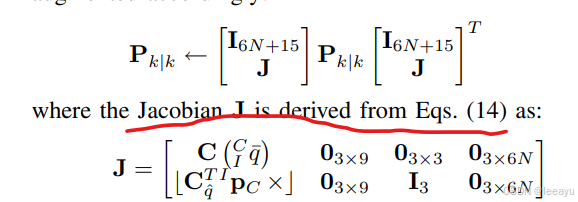
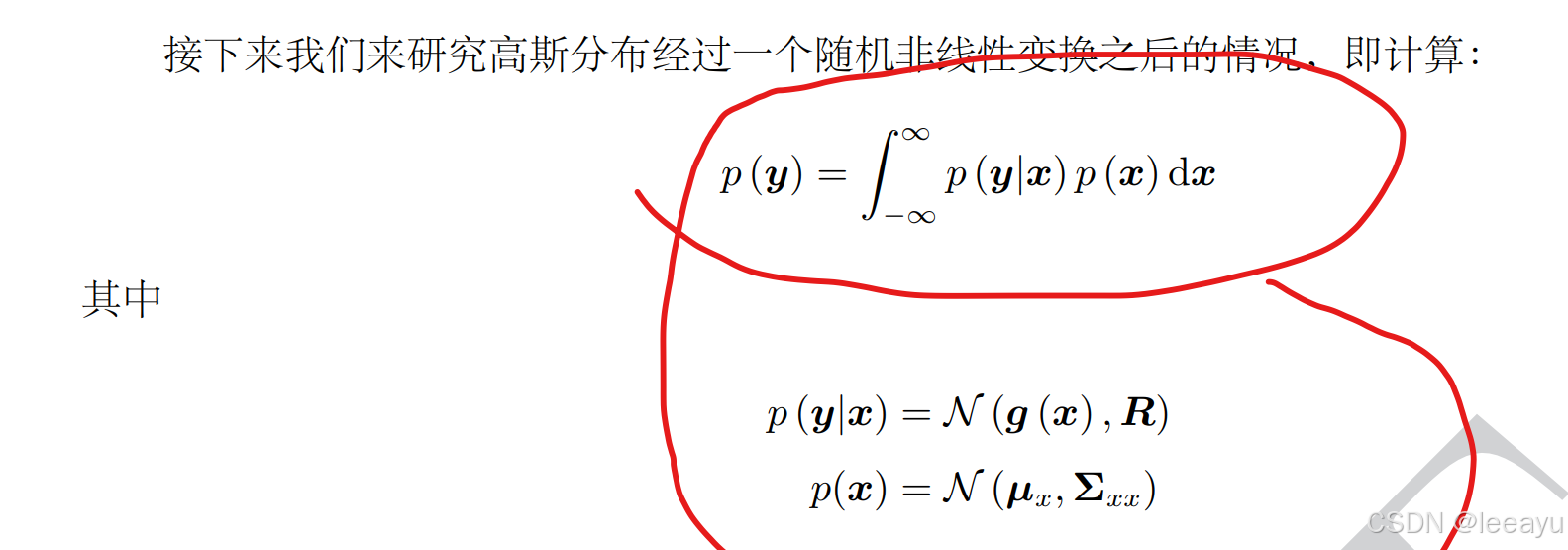
文章目录 MSCKF中camera pose状态增广的做法 状态增广的理论依据:高斯分布的非线性变换 MSCKF中camera pose状态增广的做法 考虑imu和camera之间的外参数 状态值增广计算如下 上式展开就是 状态增广的理论依据:高斯分布的非线性变换 为什么这么计算的呢,理论依据是高斯分布的非线性变换,将非线性函数线性化以后传递高斯分布的协方差。 下图是来自《机器人学的状态估计》 在MSCKF的状态增广公式中不考虑噪声R,所以协方差变换结果就是 J P k ∣ k J T JP_{k|k}J^T JP











 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 1912
1130
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
1912
1130
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






