







参考博客:
https://blog.youkuaiyun.com/qq_24894159/article/details/81265991
https://blog.youkuaiyun.com/fk1174/article/details/52673413#commentBox
数据集下载与生成
进去网站后点你想下载的对应的"download log file"
然后你可能会看到变成页面一堆数据
ctrl+a
ctrl+c(你懂的,全部复制,这就是你要的数据集)
新建一个文档如data.clf,存之.注意是.clf.
2.处理数据集
这个.clf不是我们用的,我们需要把它转化为特定格式的.bag文件,然后rosbag play来使用数据集,
下面给出转化用的python代码.
先说使用方法:
在你slam_karto下创建一个script文件夹,与launch文件夹同级目录.
把下面代码创建成一个.py文件如convert.py,然后放到script中.
因为他要用到ros库所以必须保存到某个parkage的script中.
cd这个script下,然后python convert.py path/data.clf path/data.bag 转化成功.
#!/usr/bin/env python
#coding=utf8
'''This is a converter for the Intel Research Lab SLAM dataset
( http://kaspar.informatik.uni-freiburg.de/~slamEvaluation/datasets/intel.clf )
to rosbag'''
import rospy
import rosbag
from sensor_msgs.msg import LaserScan
from nav_msgs.msg import Odometry
from math import pi
from tf2_msgs.msg import TFMessage
from geometry_msgs.msg import TransformStamped
import tf
import sys
import logging
logging.basicConfig()
def make_tf_msg(x, y, theta, t,base,base0):
trans = TransformStamped()
trans.header.stamp = t
trans.header.frame_id = base
trans.child_frame_id = base0
trans.transform.translation.x = x
trans.transform.translation.y = y
q = tf.transformations.quaternion_from_euler(0, 0, theta)
trans.transform.rotation.x = q[0]
trans.transform.rotation.y = q[1]
trans.transform.rotation.z = q[2]
trans.transform.rotation.w = q[3]
msg = TFMessage()
msg.transforms.append(trans)
return msg
if __name__ == "__main__":
if len(sys.argv) < 3:
print "请输入dataset文件名。"
exit()
print "正在处理" + sys.argv[1] + "..."
with open(sys.argv[1]) as dataset:
with rosbag.Bag(sys.argv[2], 'w') as bag:
i = 1
for line in dataset.readlines():
line = line.strip()
tokens = line.split(' ')
if len(tokens) <= 2:
continue
if tokens[0] == 'FLASER':
msg = LaserScan()
num_scans = int(tokens[1])
if num_scans != 180 or len(tokens) < num_scans + 9:
#rospy.logwarn("unsupported scan format")
continue
msg.header.frame_id = 'base_laser_link'
t = rospy.Time(float(tokens[(num_scans + 8)]))
msg.header.stamp = t
msg.header.seq = i
i += 1
msg.angle_min = -90.0 / 180.0 * pi
msg.angle_max = 90.0 / 180.0 * pi
msg.angle_increment = pi / num_scans
msg.time_increment = 0.2 / 360.0
msg.scan_time = 0.2
msg.range_min = 0.001
msg.range_max = 50.0
msg.ranges = [float(r) for r in tokens[2:(num_scans + 2)]]
msg.ranges.append(float('inf')) #我修改了这
bag.write('scan', msg, t)
odom_x, odom_y, odom_theta = [float(r) for r in tokens[(num_scans + 2):(num_scans + 5)]]
tf_msg = make_tf_msg(odom_x, odom_y, odom_theta, t,'odom','base_link')
bag.write('tf', tf_msg, t)
elif tokens[0] == 'ODOM':
odom_x, odom_y, odom_theta = [float(t) for t in tokens[1:4]]
t = rospy.Time(float(tokens[7]))
tf_msg = make_tf_msg(0, 0, 0, t,'base_link','base_laser_link')
bag.write('tf', tf_msg, t)
这个代码是python2.7,python3.5+的自己修改下不兼容的语法即可
注:在运行的时候最好source一下py所在的ros工程
py文件tf只有base_link -> base_laser_link的变换,可自己加上odom->base_link的变换
工程测试
以karto_slam测试:
因为slam_karto是依赖于open_karto的,所以要先安装open_karto.有两种方式安装karto_slam,我本人比较推荐使用第二种方式,虽然略微复杂一点,但是后续学习修改源代码会方便一点.
第一种:
sudo apt-get install ros-kinetic-open-karto
sudo apt-get install ros-kinetic-slam-karto
注意kinetic为你ros对应的版本.
第二种:
cd catkin_ws/src
git clone https://github.com/ros-perception/open_karto.git
git clone https://github.com/ros-perception/slam_karto.git
cd ..
catkin_make
catkin_make没有报错的话,基本上就安装成功了.你可以尝试运行,但在运行之前别忘记执行下source devel/setup.bash也可以一劳永逸,在home下的.bashrc末尾追加
source /home/yourusername/catkin_ws/devel/setup.bash
分两个Terminal运行:
roscore
rosrun slam_karto slam_karto
现在没有数据,肯定没有输出了,如果报错的话可能电脑坏来吧,要报错也是你catkin_make报错把.(由于我修改来launch文件,本来可以roslaunch slam_karto karto_slam.launch启动的…再这么写怕和我有区别).
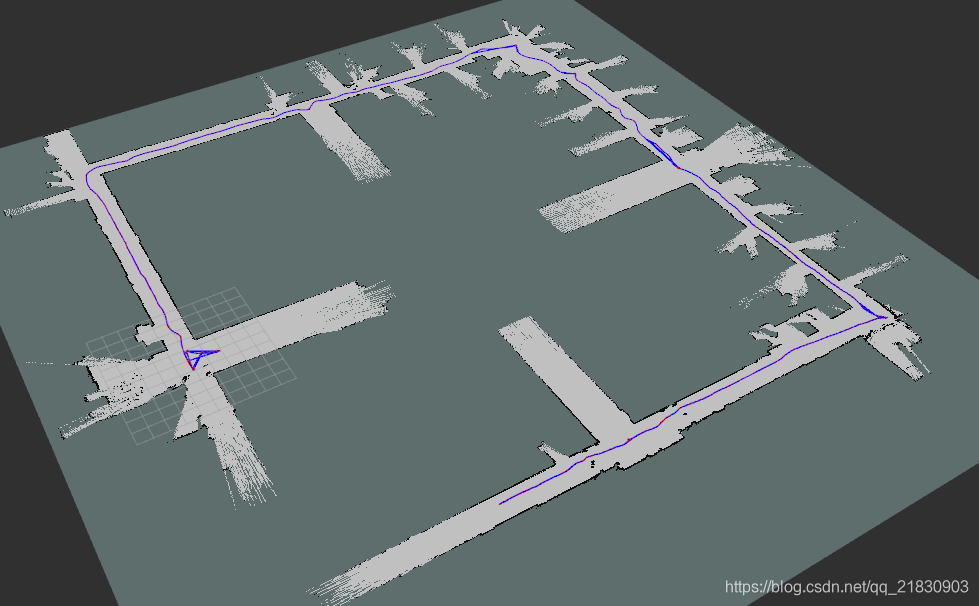
测试结果:

















 2877
2877

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









