







 本文介绍了车道线检测实验,尤其是曲线检测,采用改进的Hough变换方法。实验中,首先设定场景模拟车道线,通过Hough变换找到曲线主切线,然后在Hough空间搜索相邻像素点,但噪声对检测效果影响较大。最后提出动态阈值和曲线拟合作为改进方案。
本文介绍了车道线检测实验,尤其是曲线检测,采用改进的Hough变换方法。实验中,首先设定场景模拟车道线,通过Hough变换找到曲线主切线,然后在Hough空间搜索相邻像素点,但噪声对检测效果影响较大。最后提出动态阈值和曲线拟合作为改进方案。
一、问题引入和分析
无人驾驶技术在今发展迅猛,而车道线识别检测则是无人驾驶技术的基础与保障。本篇博客将近期来博主所做的一些车道线检测的实验(无奈,有失败的,也有成功的,虽然效果一般)做一些描述,整理成笔记,一来如果能有人给出好的建议或者意见,指出我所做的是否科学合理是再好不过了,二来,也是帮助自己记忆研究历程,便于下一步研究。
为了找到一个合适的模型,或者说是方法,能够完成车道线检测的如下几个部分:
(1)直线检测
(2)曲线检测
(3)虚线、实线的检测
我们可以简单分析一下:
(1)图像预处理:首先,需要对图像进行逆透视变换,得到俯视图,同时对车道线的检测,前提条件是待检测图中尽量只有车道线信息,那么要尽可能地减少环境带来的噪声。预处理部分,后面会着重讨论到,这里只是进行场景模拟,来检验方法或者模型是否正确;
(2)直线检测:直线检测在图像识别领域算是一个入门式的课题,如今主流的方法当然是使用Hough变换对直线进行检测,对于车道线检测,也可以使用该方法进行直线部分的检测。但是,要注意两个主要的问题(后续问题,后续再具体分析):
1>重复检测:这里的重复检测主要指非极大值抑制后仍然出现的重复检测,而是指由于曲线的存在,而导致相近位置不同角度的检测:
2>错误检测:由于曲线的引入,导致检测出角度偏差很大的直线: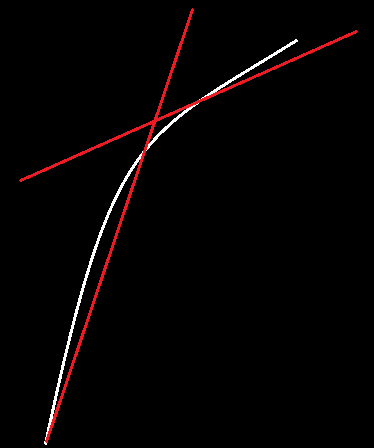 事实上,这些问题可以通过加上一些限制条件以及直线聚类的方法解决。本文暂不讨论这些问题,关于直线的筛选和聚类问题,后面文章会有详细阐述。
事实上,这些问题可以通过加上一些限制条件以及直线聚类的方法解决。本文暂不讨论这些问题,关于直线的筛选和聚类问题,后面文章会有详细阐述。
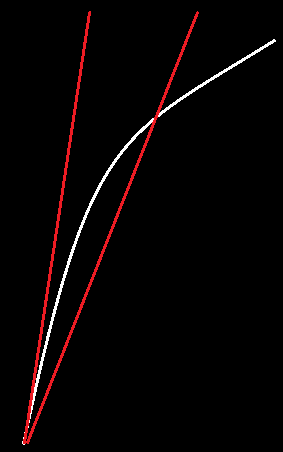
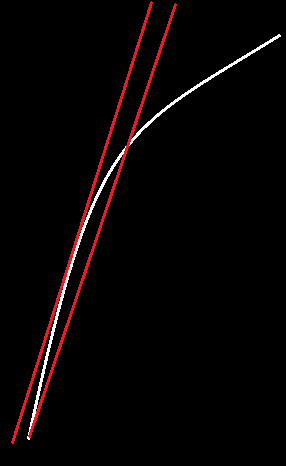
(3)曲线检测:该部分较为复杂,也是本文现阶段重点讨论的问题;
(4)虚线实线的检测:初步想法,可以通过直线部分,检测直线周围有效像素点所占比重来粗略估计,该部分,也不作为现阶段重点讨论的问题。
总结来说,本文现阶段,主要讨论直线检测+曲线检测的模型和方法!
二、基于改进Hough变换的曲线检测模型
(参考:http://d.wanfangdata.com.cn/Patent/CN201310717643.3/
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 428
428

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









