







 超级会员免费看
超级会员免费看
struct Quaternion
{
double w, x, y, z;
};
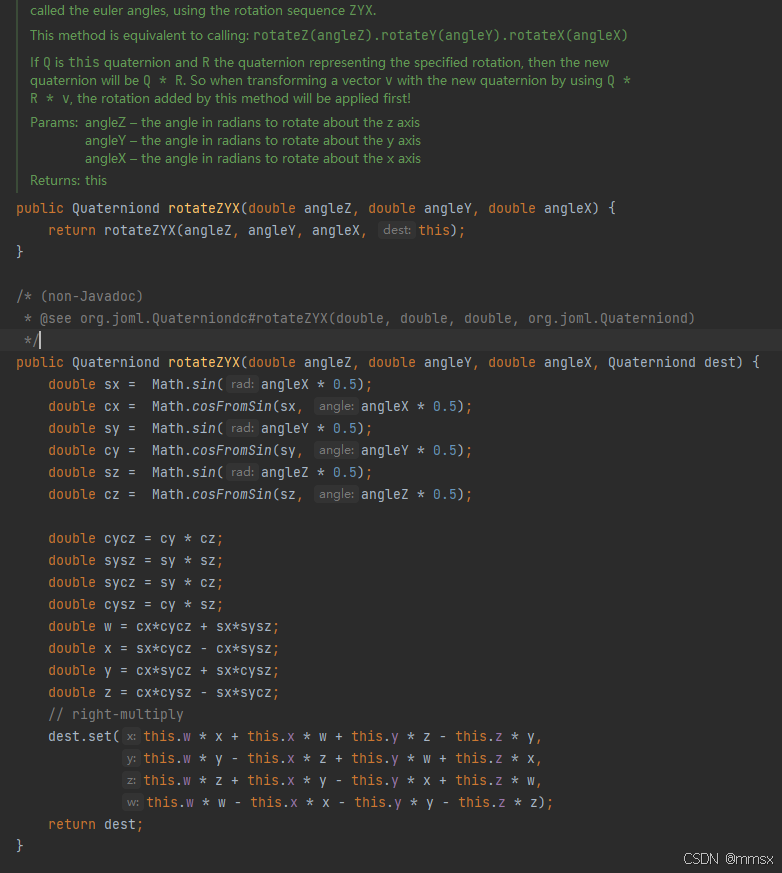
Quaternion ToQuaternion(double yaw, double pitch, double roll) // yaw (Z), pitch (Y), roll (X)
{
// Abbreviations for the various angular functions
double cy = cos(yaw * 0.5);
double sy = sin(yaw * 0.5);
double cp = cos(pitch * 0.5);
double sp = sin(pitch * 0.5);
double cr = cos(roll * 0.5);
double sr = sin(roll * 0.5);
Quaternion q;
q.w = cy * cp * cr + sy * sp * sr;
q.x = cy * cp * sr - sy * sp * cr;
q.y = sy * cp * sr + cy * sp * cr;
q.z = sy * cp * cr - cy * sp * sr;
return q;
}
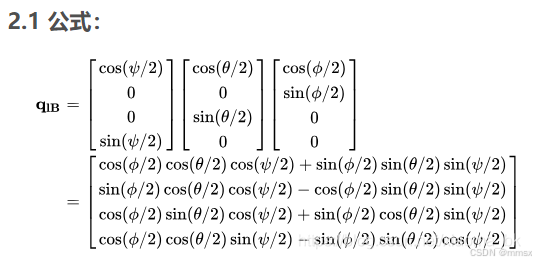
上面是欧拉角转四元数的java代码。
下面图片是四元数转欧拉角。


















 576
576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











