







 本文探讨了多波束测深数据中粗差产生的原因,并重点介绍了趋势面滤波、不确定度滤波、投影仿人工滤波以及深度学习滤波等自动滤波方法,分析了各类方法的优缺点,旨在提高数据精度。
本文探讨了多波束测深数据中粗差产生的原因,并重点介绍了趋势面滤波、不确定度滤波、投影仿人工滤波以及深度学习滤波等自动滤波方法,分析了各类方法的优缺点,旨在提高数据精度。
目录
注:本文内容收集自网络,仅供学习使用。
一、粗差产生原因
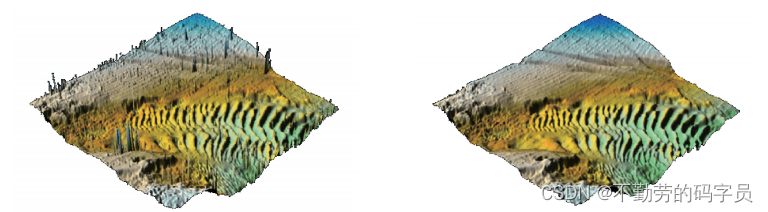
当前,多波束测深系统已成为海底地形探测的主要设备,但在测量过程中由于仪器自噪声、海况因素、设备参数设置不合理及海中生物的影响,导致多波束测深数据不可避免地存在较多粗差,严重影响了海底地形的真实表达。
二、粗差剔除方法
为了提高多波束测深数据的精度,需要对其进行滤波处理。依据多波束测深数据粗差探测手段的不同,多波束测深数据滤波方法可大致划分为交互式滤波和自动滤波两类。
- 交互式滤波:是一个主观识别和标定错误的过程,即在三维可视或者在二维投影的环境下,由作业人员人工标定测深数据中的异常值,滤波效率相对较低,且严重依赖作业人员的主观经验;
- 自动滤波:为克服交互式滤波的缺点,国内外学者通过将数理统计、误差处理、地形分析等理论和方法融入粗差探测技术中,提出了诸多自动滤波方法。
三、自动滤波方法分类
3.1 趋势面滤波
3.1.1 基本原理
趋势面滤波法是一种以曲面拟合函数为数值分析基础的误差处理算法。其算法构建原理为:依据波束脚印的深度值和平面位置坐标,构造出反映海底地形变化趋势的多项式曲面函数,计算和统计实测水深值与所构造趋势面间的深度偏离量,结合误差处理理论建立粗差数据的判定准则,实现多波束测深数据的自动滤波。趋势面滤波法中曲面拟合函数的一般形式为:
3.1.1 现有方法
在诸多自动滤波方法中,由于趋势面滤波法设计思想简单、预设参数较少、易于并行计算等特点,受到了海洋测绘学者的广泛关注。
- 文献【海洋测量异常数据的检测】提出了一种基于加权平均移动模型的深度滤波方法,在假设海底地形连续的条件下识别多波束条带内标准偏差异常高于平均值的水深点,并运用2σ或3σ准则对多波束数据进行滤波。
- 文献【多波束测深数据的误差分析与处理】将趋势面滤波的思想引入到多波束测深数据异常值判定中,利用一定范围内的水深值z和平面坐标(x,y)进行多项式趋势面拟合,并结合2σ或3σ准则对异常值进行判定。
- 文献【海洋测量异常数据的检测】针对基于函数/统计推值的比较判别法在检验异常数据时出现的异常值“遮蔽”现象,将抗差估计理论引入到检验异常值的推值比较法中,提出了一种基于抗差估计的选权迭代插值比较检验法,采用简单加权平均数模型作为判别异常值的推值模型,在被检测点邻域内选取正确观测数据,拒绝不正确或者带有粗差的数据,提高了检测方法的抗差性。
- 文献【利用水深不确定度探测测深异常值的方法】针对最小二乘支持向量机(LSGSVM)在构造海底趋势面过程中存在的数值解稀疏性较差以及样本数据偏差引起的拟合曲面形态失真等问题,提出了一种基于水深不确定度调控的趋势面滤波方法,利用水深不确定度调控模型对训练样本数据进行形态优化,构造出反映海底实际变化的趋势面,实现对测深异常值的有效剔除。
- 【考虑自然邻点影响域的多波束测深数据趋势面滤波改进算法】提出了一种基于自然邻点影响域的多波束测深数据趋势面滤波改进算法。该算法在引入散乱水深点局部最小范围———自然邻点影响域的概念的基础上,通过构造影响域内特定局部坐标系下的统一曲面拟合函数,进行传递式迭代趋势面滤波,逐步滤除影响正常水深点判定的粗差数据,并针对突变地形边界点难以确定的问题,根据边界点在其相邻邻域地形内连续性不一致的特性,建立了面向突变地形边界点的判断准则,最后通过实验验证了改进算法的有效性。
3.1.2 缺点
然而由于海底地形的复杂多变以及局部曲面拟合范围的不确定性,趋势面滤波法存在其固有的技术缺陷,主要体现在:
- 由于海底地形复杂多变,局部曲面拟合范围不易确定,单一的曲面拟合函数无法全面反映海底的实际地形,极易出现粗差滤除不彻底或误将正常水深判定为粗差点进而被滤除的情况;
- 当局部曲面拟合范围内存在较大的突变粗差点时,将会导致正常水深点与所拟合的趋势面之间产生较大偏差,进而影响正常水深点的判定结论,当局部曲面拟合范围内存在的粗差点相对集中且成簇出现时,趋势面滤波法将无法检测出所有粗差点,相反可能出现将粗差点误判为正常水深点保留,而将正常水深点误判为粗差点滤除的情况;
- 趋势面滤波法的构建前提是海底地形的连续性,当海底出现断裂点(如断崖)或障碍物(如暗礁或沉船)时,趋势面滤波法可能导致断裂点或障碍物被不合理滤除的情况。
3.2不确定度滤波方法
- 文献【Automatic Processing of High rate,High density Multibeam Echosounder Data】提出了一种基于不确定度理论的多波束测深数据滤波算法———CUBE(combined uncertaintyandbathymetryestimator)算法,该算法主要利用测深数据的深度信息和不确定度信息,通过卡尔曼滤波方法剔除数据中可能存在的粗差,滤波效果较为理想。
- 文献【基 于 识 别 变 量 的 粗 差 探 测Bayes方法】引入了观测值识别变量的概念,构建了识别变量均值漂移模型,提出了一种基于识别变量后验概率的粗差探测Bayes方法。
- 在此基础上,文献【利用 Bayes估计进行多波束测深异常数据探测】将该粗差探测Bayes方法应用于多波束测深数据异常值探测中,通过构造水深观测识别变量判别模型对异常值的后验概率进行分析,判断和识别水深观测数据中的异常值。
3.3 投影仿人工滤波方法
- 文献【多波束测深数据的异常检测和滤波】提出了一种基于中值滤波、局部方差检测和小波分析理论的联合滤波方法,该方法中的局部方差检测模型避免了中值滤波对海底地形细节的破坏,小波分析理论增强了数据的抗差性和算法的可靠性。
- 阳凡林博士后出站论文


















 969
969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











