



 博主在尝试运行roscore时遇到错误,通过执行`sudo apt install python-roslaunch`发现python-roslib依赖版本不匹配。为解决此问题,博主使用`sudo aptitude install python-roslib`尝试修复依赖,但在处理python-catkin-pkg时遇到问题。随后,博主先卸载了python-catkin-pkg,再重新安装python-roslib,成功解决了依赖问题。最后,再次运行`sudo apt install python-roslaunch`,roscore得以正常启动。
博主在尝试运行roscore时遇到错误,通过执行`sudo apt install python-roslaunch`发现python-roslib依赖版本不匹配。为解决此问题,博主使用`sudo aptitude install python-roslib`尝试修复依赖,但在处理python-catkin-pkg时遇到问题。随后,博主先卸载了python-catkin-pkg,再重新安装python-roslib,成功解决了依赖问题。最后,再次运行`sudo apt install python-roslaunch`,roscore得以正常启动。
首先尝试roscore,报错,尝试推荐解决办法sudo apt install python-roslaunch,出现如下问题:
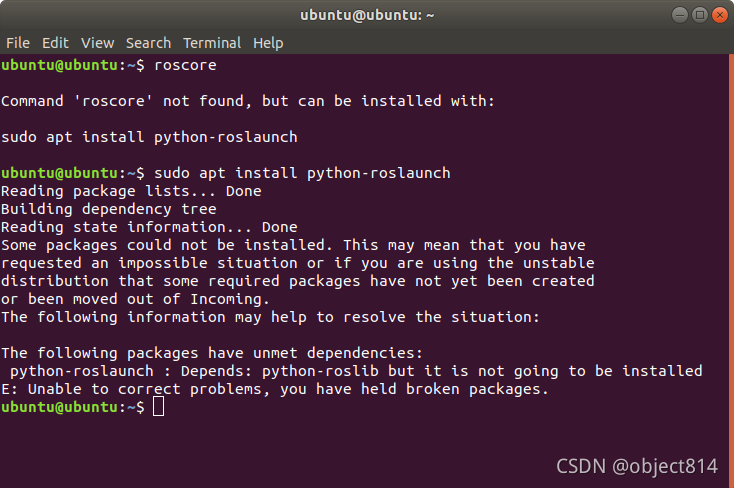
判断python-roslib的依赖项的版本不对,尝试sudo aptitude install python-roslib解决依赖问题,发现在重写python-catkin-pkg时出现问题:

于是先使用aptitude卸载python-catkin-pkg,再尝试重装python-roslib,成功!
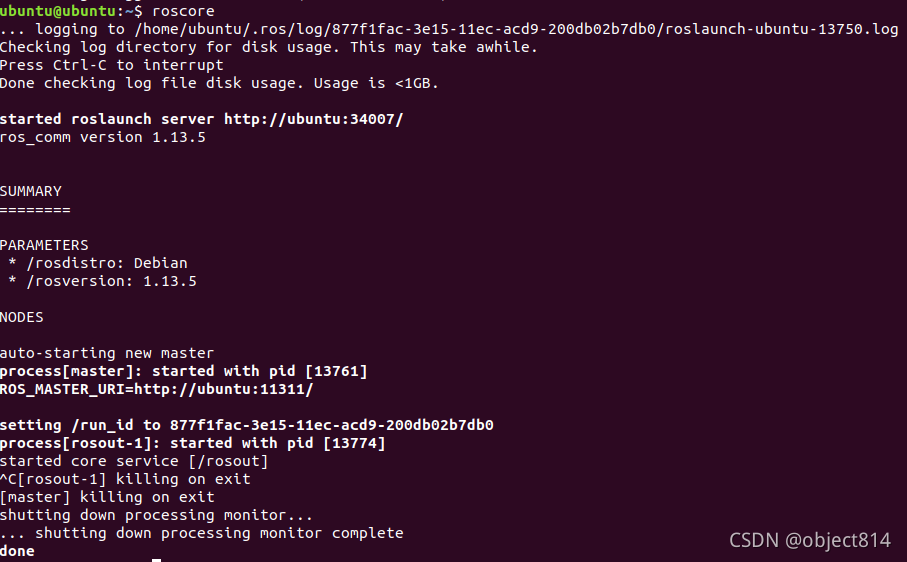
再次sudo apt install python-roslaunch,成功,roscore正常运行!

















 478
478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









