




Based on EB tresos
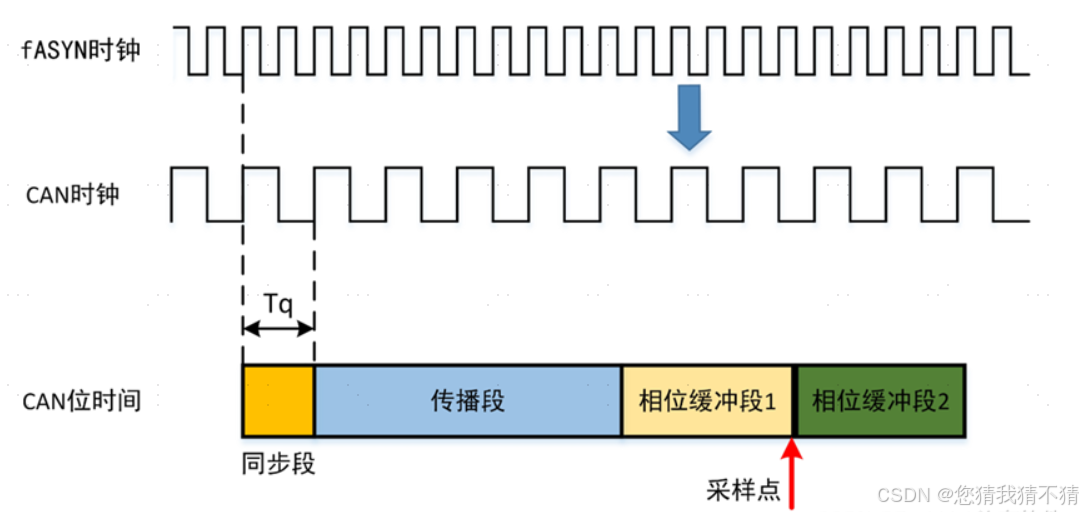
1、波特率及采样点
其中,CAN时钟分频在Mcal Mcu Clock Config中已进行,如下图所示

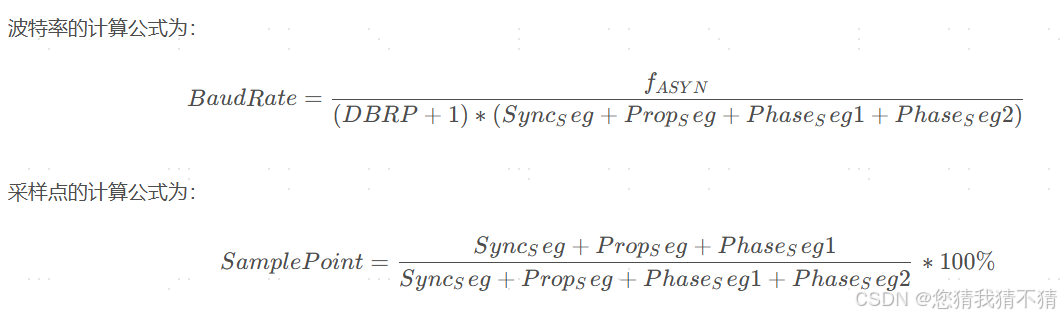
因此BaudRate中,Fasyn/(DBRP + 1)项为40MHz,其余介绍如下:
1、SynCseg同步段,标准1个Tq
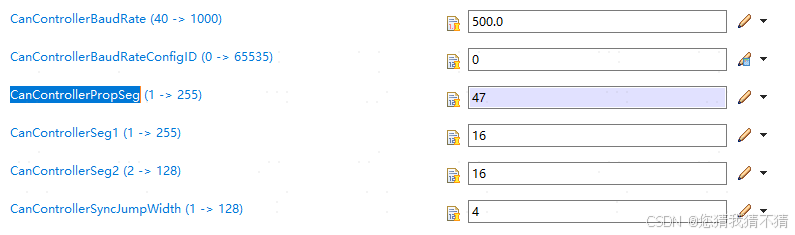
2、Propseg传播段,在mcal中对应Can设置为CanControllerPropSeg,单位Tq
3、Phaseseg1相位缓冲段1,在mcal中对应Can设置为CancontrollerSeg1,单位Tq
4、Phaseseg2相位缓冲段2,在mcal中对应Can设置为CancontrollerSeg2,单位Tq
这些变量与波特率和采样点有关,下面是典型配置,供参考,can采样点80%,canfd仲裁段80%,数据段70%
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3470
3470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











