




 本文介绍了一种程序,通过帧间配准、图像强度线性化和最大后验融合,改善前视声纳视频序列的低信噪比和分辨率。方法特别适用于FLS视频,验证了在DIDSON序列上的性能提升,有助于目标物体识别和表面纹理清晰度的改善。
本文介绍了一种程序,通过帧间配准、图像强度线性化和最大后验融合,改善前视声纳视频序列的低信噪比和分辨率。方法特别适用于FLS视频,验证了在DIDSON序列上的性能提升,有助于目标物体识别和表面纹理清晰度的改善。
论文:Video Enhancement for Underwater Exploration Using Forward Looking Sonar Video
Abstract
机器人技术和成像技术的进步为新环境的无人探索领域带来了各种成像设备。前视声纳是一种新兴的水下环境探测成像技术。由于前视声纳系统产生的视频序列具有低信噪比、低分辨率和视野范围有限的特点,因此期望视频增强技术能够促进视频序列的解释。因为前视声纳视频序列的视频增强技术适用于大多数前视声纳序列,且光学摄像机视频增强技术只有专门制作的视频序列才能受益,所以开发前视声呐视频序列的视频增强技术比开发光学摄像机视频增强技术更为关键。在本文中,我们介绍了一种程序,以增强前视声纳视频序列通过合并的知识,获得的目标物体在先前的观察帧。该方法包括帧间配准、图像强度线性化和视频序列中图像的最大后验融合。通过增强双频识别声纳(DIDSON)的视频序列来验证该程序的性能,DIDSON是市场领先的前视声纳系统。
Introduction
前视声纳是一种通过叠加由一维换能器阵列产生的一维图像来产生二维图像的声纳。与传统声纳不同,前视声呐的波束形成是自发实现的,无需额外的计算,因此它可以以与光学摄像机相当的帧速率产生相对高分辨率的图像。
其优点是高帧率、相对较高的分辨率、低功耗和便携性,但与光学相机相比仍有不足之处:首先,角度分辨率相对较低,通常小于100像素;其次,由于b扫描图像的特性,其信噪比仍然低于光学相机。
Scope of Applicable Video Sequences
基于超分辨率技术的视频增强算法基本上由三部分组成:1) registration配准,2) transformation变换,3)fusion融合。
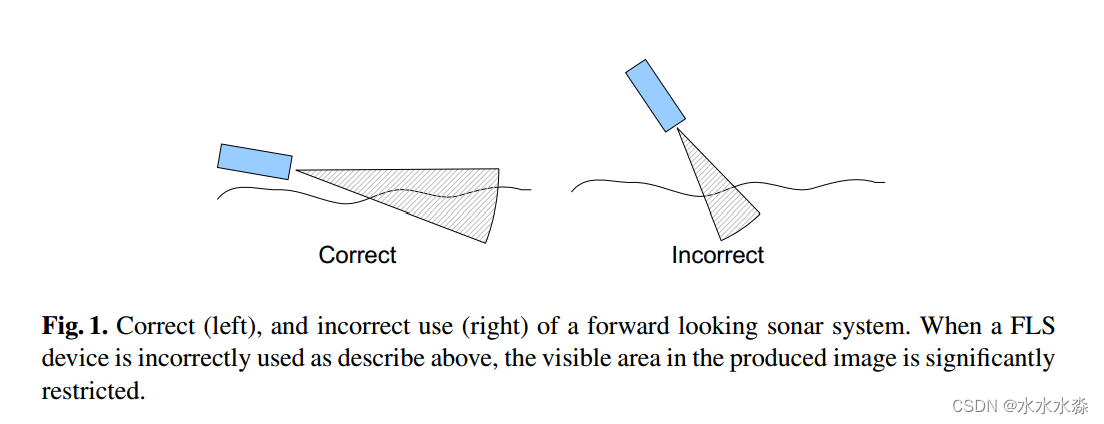
对于图像配准,需要根据成像设备的成像几何形状对图像间的单应性进行建模。大多数光学相机图像增强方法使用透视单应性或类似的低层次单应性,如仿射单应性。然而,投影单应性要求目标物体是一个平面,或者相机只进行旋转运动而不进行平移运动。对于光学摄像机来说,大多数有意制作的视频序列都能满足这一要求。而从图像采集层面上看,前视声呐要求目标物体在一个平面上,会导致声纳的可见性非常狭窄,输出图像有明显的渐晕(
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 9291
9291

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











