 基于GMSR的窄边框驱动设计
基于GMSR的窄边框驱动设计




A Novel Gate Driver Circuit Design for Ultra Slim Border
1. 引言
栅极驱动器(GOA)近年来已成为显示领域的主要驱动技术,因为它能提供窄边框、高鲁棒性以及低制造成本的驱动电路[1‐3]。由于这些原因,栅极驱动电路设计已迅速发展。然而,尽管栅极驱动电路设计能够减小面板边框,但如果栅极驱动电路的行线未被触发,则需要解决可靠的分析和稳定性问题。因此,如何同时缩小面板边框并稳定栅极驱动电路信号已成为一个主要问题。
目前,许多研究通过简化传统的GOA电路[4‐5]来改进电路设计。然而,在这些电路中,其驱动方法采用移位寄存器(SR)传递行线信号,从而导致SR延迟。此外,由于SR延迟与自举效应的影响,电路的驱动能力较差。为了增强GOA的驱动能力,直接的方法是增大薄膜晶体管(TFT)的尺寸,但这会增加GOA的面积。因此,需要在边框和驱动能力之间进行合理的GOA设计。然而,当面板分辨率提高时,RC负载问题更加严重。因此,一般GOA的驱动方法不适用于高分辨率显示器。
为了解决这一问题,提出了栅极多路复用器(GM)方法[6]。该方法仅通过一个TFT利用外部信号直接驱动行线,但也会增加总线的数量。为了减小总线的边框宽度,采用SR电路替代一条总线信号[7]。然而,在输出节点放电后,行线完全处于浮空状态,因此输出波形的稳定性较差[8]。
本文提出了一种带有门极多路复用器和稳定化电路的新型栅极驱动电路设计。与带有门极多路复用器的栅极驱动电路相比,通过使用两个内部信号即可稳定输出波形,而无需额外的外部信号。此外,同时考虑了面板边框的优化、驱动能力的提升以及栅极驱动电路的稳定性。
2. 提出的GOA结构及利用内部信号实现稳定性
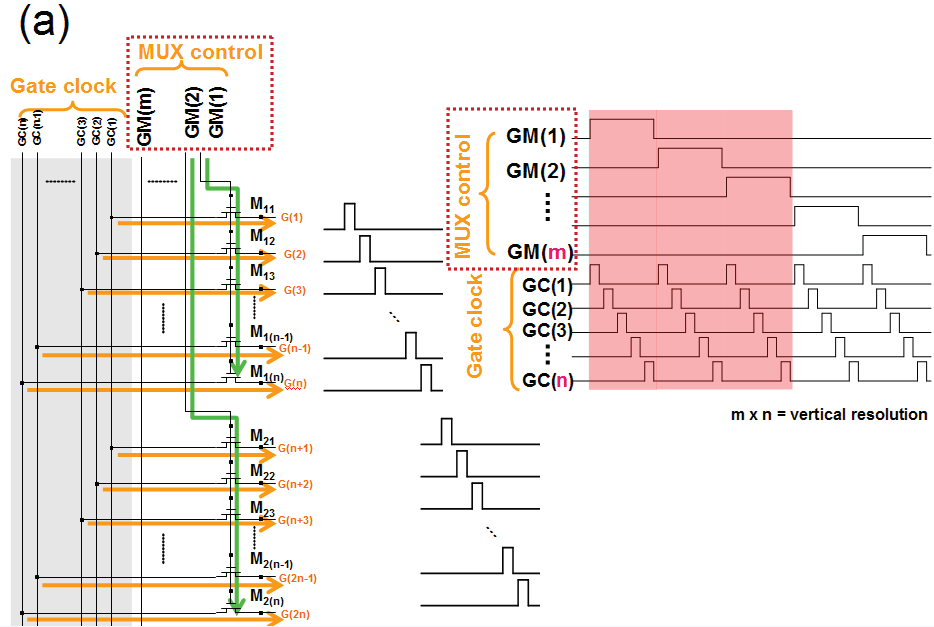
图1(a)和(b)分别示出了带有GM电路的栅极驱动电路。带有门极多路复用器的栅极驱动电路的电路示意图分为两部分,包括栅极时钟信号(GCs)和GM信号,如图1(a)所示。
在此电路中,GM的信号被设置为TFT M的栅极,以切换GC的信号。虽然驱动能力得以增强,但GC和GM的信号均来自外部IC。外部信号的总线导致GOA边框增大了电路布局面积,因此有必要用SR电路替代它们,如图1(b)所示。每一级中包含两个GC和一个SR电路。GM的信号由SR电路产生。由于SR电路的设计,GM的总线可以被消除。此外,SR电路的布局可容纳在像素两倍高度的空间内。就布局复杂性而言,它比传统的GOA更简单。然而,从电路稳定性考虑,当GM信号被关闭时,行线电压无法稳定在低电平。换句话说,这表明在TFT M级处于关态时,栅极多路复用器电路设计中存在浮空问题。
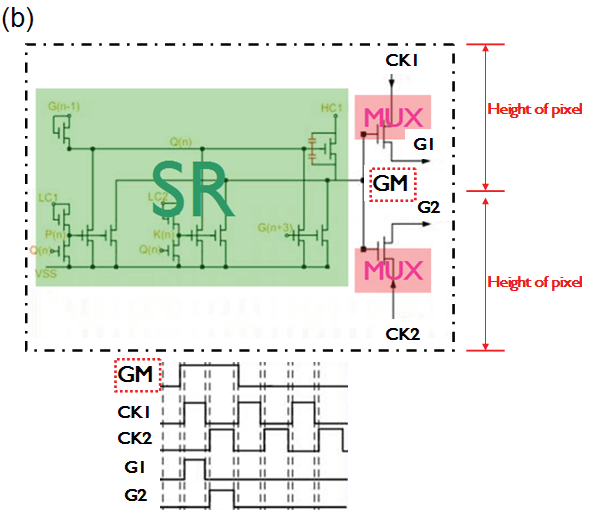
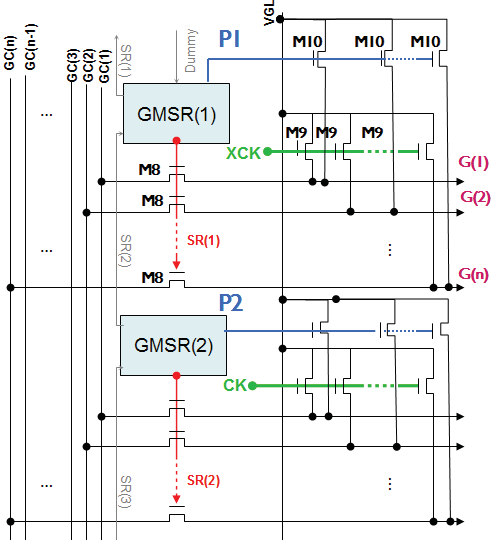
图2显示了所提出的门极多路复用移位寄存器(GMSR)的示意图。GMSR意味着它不仅充当GM,还充当SR。在本研究中,我们采用7T2C作为SR电路的基础,但GMSR的结构并不局限于SR电路,如图3所示。对于每一级,我们设计了一个GMSR来切换八个GC信号。为了解决浮接问题,我们在每行线上增加了两个TFT,并引入内部信号以实现稳定性。首先,将GMSR中p点的信号连接到TFT M10的栅极;其次,将GMSR中XCK信号连接到TFT M9的栅极。通过这种集成方法,我们可以获得与各级GM信号相反的完整稳定性信号。此外,该方法在不引入额外外部信号的情况下改善了GMSR的浮接问题。
3. 电路仿真与传统GOA和提出的GOA的比较
提出的GOA的仿真结果如图4所示。红色虚线表示稳定性的信号。我们可以发现,在GM1处于高电平时,XCK和P1的电压均为高电平,关态。在此设计中,输出信号表示为G(1)‐G(8)。在红色虚线区域内,所有输出电压均保持在低电平栅极电压(VGL)。因此,当GOA级被禁用时,提出的GOA能够下拉输出电压并抑制噪声信号。
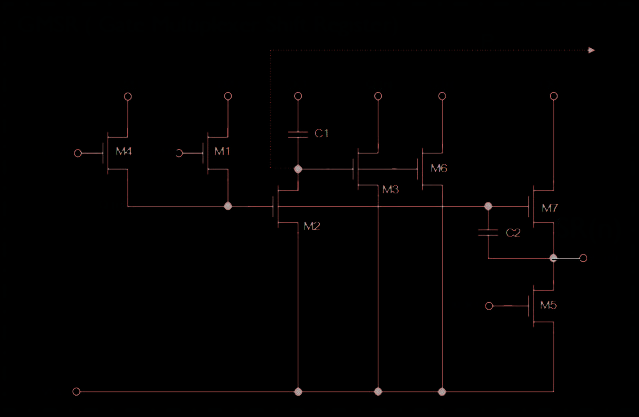
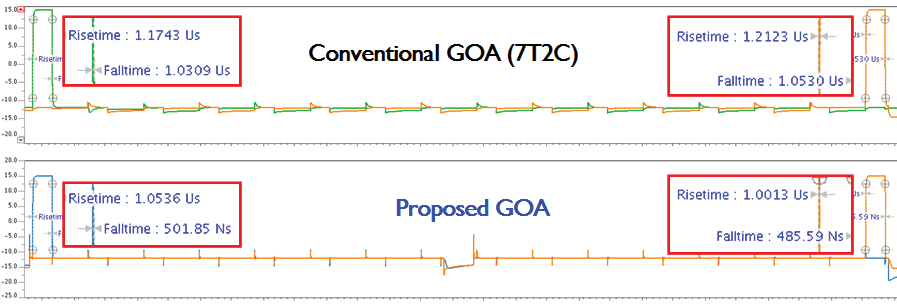
图5显示了输出信号的仿真结果。传统的GOA采用7T2C结构表示。与传统的GOA相比,由于一个GMSR级具有八个输入信号,我们评估了第一个和第八个输出信号的性能。可以看出,无论对于第一个还是第八个输出信号,提出的GOA均能改善上升和下降时间。
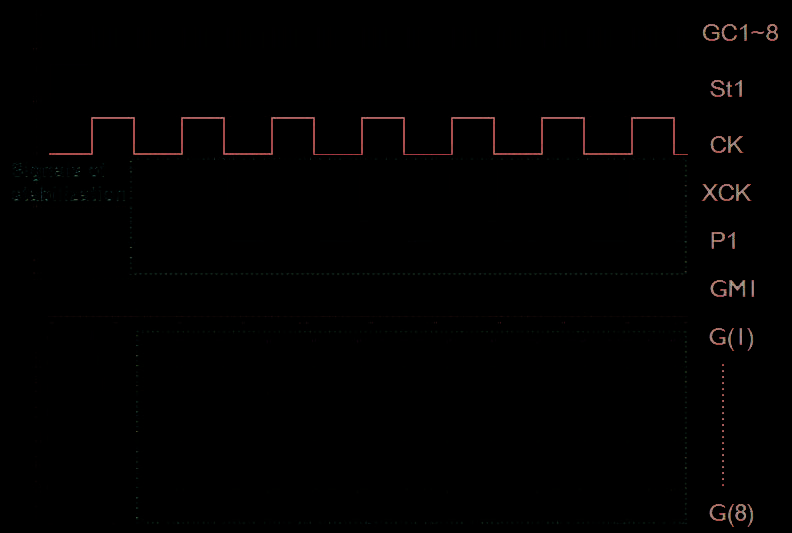
图6展示了传统GOA和提出GOA的布局。由于一个SR电路对应八行线,我们可以转换SR电路的方向,使SR电路沿列方向排列。在图5的左侧部分,尽管由于GC信号的引入导致总线数量增加,但反向的SR电路仍可节省更多的布局空间。在图5的右侧部分,传统GOA和提出GOA的边界分别为1610μm和1018μm。因此,提出的GOA能够大幅减少布局面积。如表1所示,详细结果的比较已总结列出。常规布局以传统GOA为基准,在相同级数条件下,提出的GOA可减少25个薄膜晶体管,减少36.3%的布局面积,并提高驱动能力。
如图7所示,我们在玻璃基板上采用非晶硅TFT制备了提出的GOA。可以观察到,在GM1为高电平时,G(1)和G(8)的输出脉冲被生成。这表明提出的GOA已成功验证。此外,当GM1处于关断状态时,G(1)和G(8)的电压均可保持在VGL(低电平电压)。由此可见,测试结果表明,具有稳定性的提出的GOA得以实现。
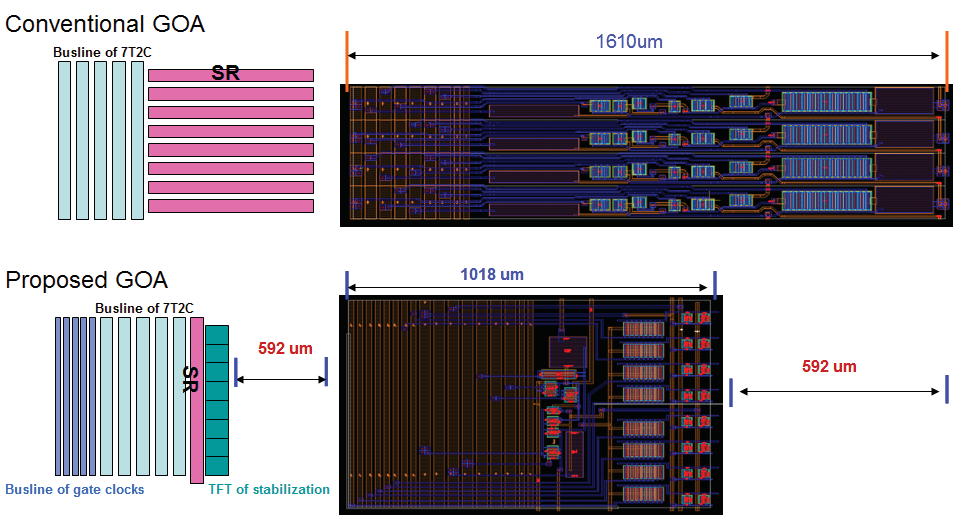
表1. 两个仿真结果的比较
| 传统的GOA(7T2C) | 提出的GOA | |
|---|---|---|
| TFT数量 | 56 | 31 |
| 归一化的GOA边框相比传统的GOA (%) | 100% | 63.7% |
| 上升时间/下降时间 第一级 | 1.17us/1.03us | 1.05us/0.5us |
| 上升时间/下降时间 第8位 | 1.21us/1.05us | 1.00us/49us |
4. 结论
本文提出了一种利用GMSR实现GOA稳定性的方法。与传统的GOA相比,GOA边框可减少36.3%。此外,稳定性和驱动能力可同时得到提升。通过使用内部信号,可在SR电路处于关态时稳定GOA的输出。因此,提出的GOA不仅能够实现良好的稳定性,还能实现窄边框设计。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









