



在ubuntu虚拟机中打开sdk manager;短接设备FC REC引脚和GND引脚,通过烧录接口连接虚拟机,通电。SDK manager识别到设备,进入step1和step2,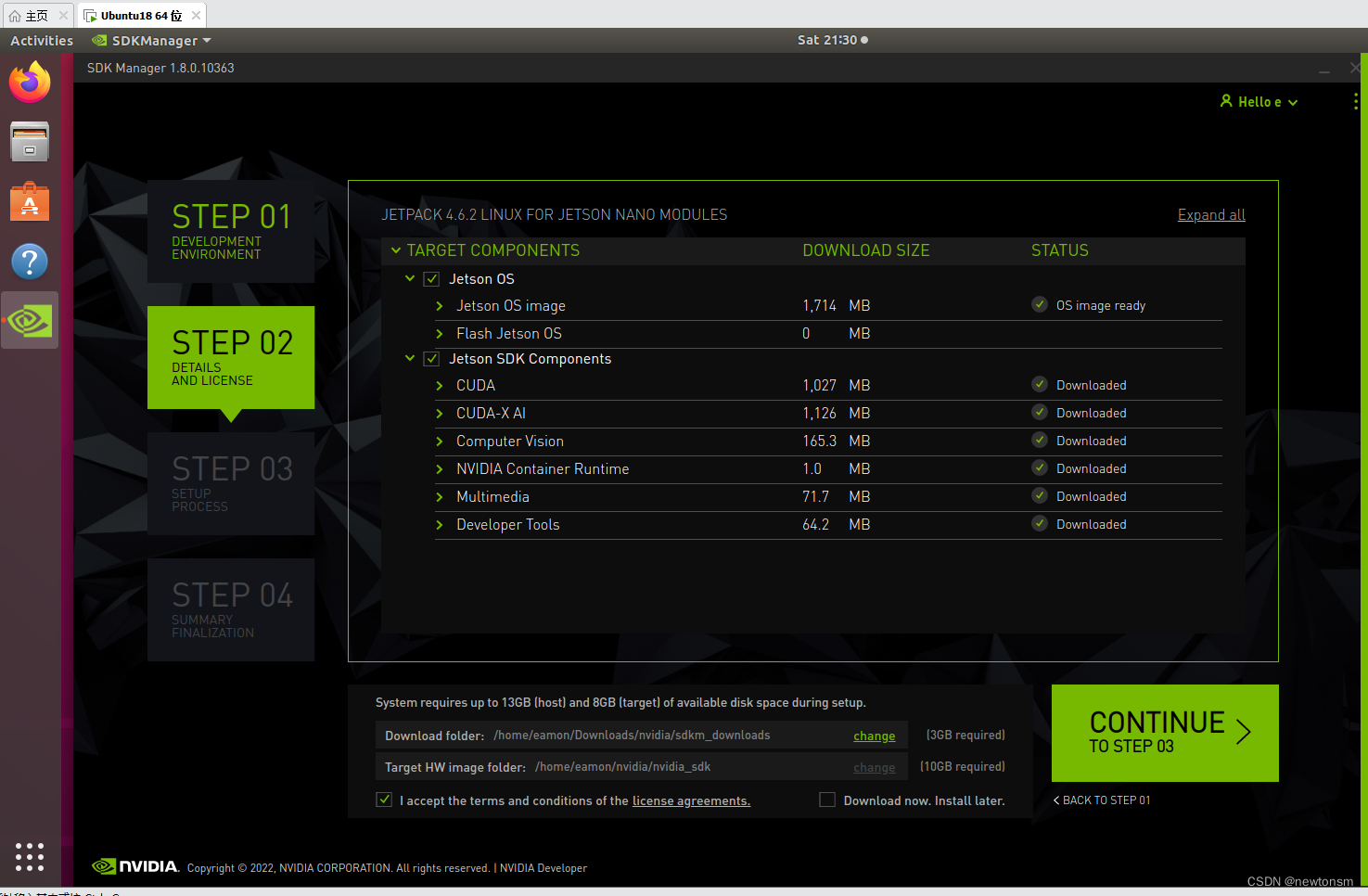
I accept后进入step3,自动安装不知为何会卡死,选Manual Setup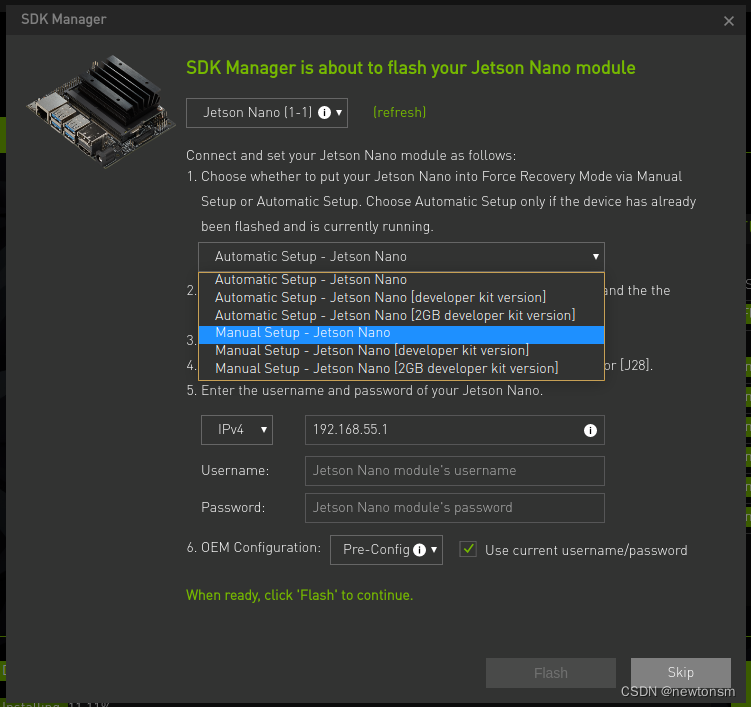
点flash后就是漫长的等待。
等设备启动进入登录页面后复核账号密码后继续
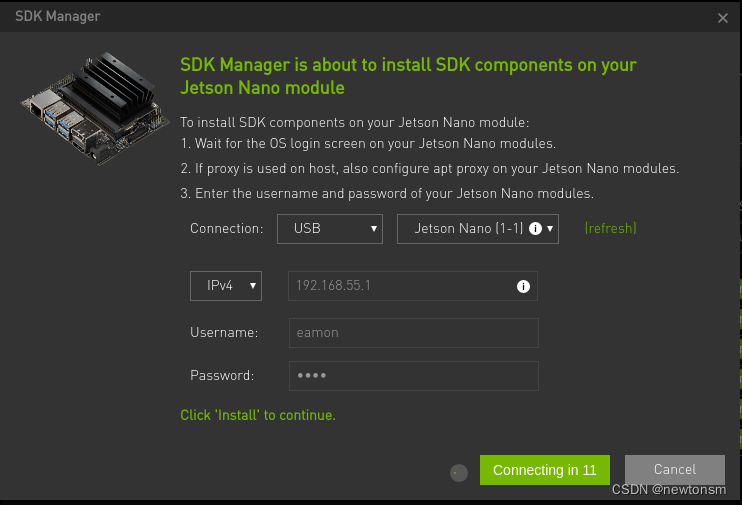
接着等待。
挂载设备厂商提供的TF卡驱动
将tegra210-p3448-0002-p3449-0000-b00.dtb文件复制到设备上,然后复制到/boot目录下
sudo cp tegra210-p3448-0002-p3449-0000-b00.dtb /boot
编辑/boot/extlinux/extlinux.conf配置文件
sudo gedit /boot/extlinux/extlinux.conf
TIMEOUT 30
DEFAULT primary
MENU TITLE L4T boot options
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
#此处增加下面一行内容
FDT /boot/tegra210-p3448-0002-p3449-0000-b00.dtb
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyTCU0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0
重启后
使用TF卡空间扩展/usr文件夹,腾出根目录的使用空间。
参考 (141条消息) ubuntu创建新硬盘分区挂载/usr 解决系统/ 目录存储空间不足的问题_Yikakabu的博客-优快云博客_ubuntu挂载usr
首先需要激活root用户,设置root用户密码。
# 设置密码
sudo passwd root
# 切换用户
su2.挂载
在home中创建一个临时文件夹,这里命名为temp
sudo mount -t ext4 /dev/sdb8 /home/huo/temp
3.复制
sudo cp -ax /usr/* home/huo/temp 将/usr分区现有内容拷贝到分区
sudo umount /dev/sdb8 为了后面挂载/usr,再将sdb8卸载
4.替换
sudo mv /usr /usr.old
sudo mkdir /usr
因为/usr被重命名,所以sudo命令暂时失效,run“su”进入root用户
mount /dev/sdb8 /usr 将新的/usr挂载到sdb8
5.设置开机自动挂载
在/etc/fstab最后添加一行:使用UUID挂载,避免挂载失败
/dev/sdb8 /usr ext4 defaults 0 1
6.释放原来的/usr空间
reboot重启之后删除/usr.old
————————————————
版权声明:本文为优快云博主「Yikakabu」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.youkuaiyun.com/Yikakabu/article/details/84648049
失败:not writing through dangling symlink
Jetson Nano 系列之:刷机、瘦身、部署应用_ironinfo的博客-优快云博客
最大限度地减少 Jetson 上的存储使用 - NVIDIA 技术博客
#!/bin/bash
echo "Lift AI Entry 1.0!"
# cd /home/eamon/publish
# /media/eamon/sdcard/dotnet/dotnet LiftAIPWC.dll
read
设置Startup Applications:
gnome-terminal -- bash -c "/home/eamon/entry.sh"别忘了加可执行权限
chmod +x ./entry.sh
报错处理


















 673
673

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









