




论文做了两个工作:一是环境中有动静态障碍物、红路灯、限速等不同类型的语义预算,使用统一的时空语义走廊进行建模,二是多数基于优化和Lattice的方法,只能在采样点保证无碰撞约束,使用分段贝塞尔曲线,在时空语义走廊内进行时空联合轨迹规划,保证整个轨迹的安全性。
1. 时空语义走廊
时空语义走廊是sltsltslt的3D3D3D空间,采用FrenetFrenetFrenet坐标系是因为,一是交通灯、限速等语义信息是和道路相关的,二是人类驾驶行为可以分为横向和纵向。采用FrenetFrenetFrenet的另一个好处,个人认为时空走廊的配置空间slslsl可以限制在一定范围内,如果使用笛卡尔坐标系,xyxyxy范围会有较大的变化,比如在高速路和城区的十字路口。
1.1 输入
- 地图;
- 动态障碍物预测轨迹;
- 参考车道;
- 初始解(粗解);
时空走廊是基于初始解生成的,初始解由上游行为决策模型生产。
1.2 分类
- Obstacle-like semantic elements:比如动静态障碍物、红灯,会占据sltsltslt的三维空间;
- Constraint-like semantic elements:表示sltsltslt一个维度或者两个维度的约束,比如限速、换道时间等;
1.3 时空走廊生成
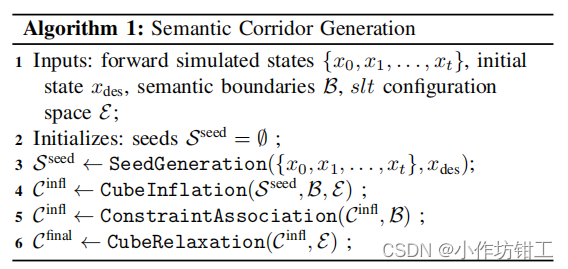
如算法111所示,时空走廊的生成包含四个步骤:seed generation (Line 3), cube inflation (Line 4), constraint association (Line 5) and cube relaxation (Line 6)。
1.3.1 seed generation
将行为决策和ADCADCADC初始状态映射在sltsltslt配置空间上,由于行为决策得到的初始解状态是离散的,因此时空走廊的可行性依赖于环境的复杂性和seed的分辨率(sltsltslt的分辨率?)。为了保证可以生成时空走廊,就需要使两个相邻seed形成的cube是无碰撞的,当相邻两个seed形成的cube有碰撞,则时空走廊生成在此终止,也就是ADCADCADC要停在这个位置。
1.3.2 cube inflation
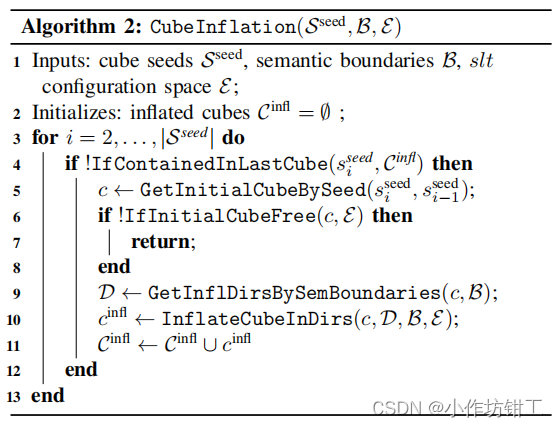
依次遍历seed,如果上一个已经膨胀处理过的cube已经包含这个seed,则跳过处理下一个seed。当前seed和上一个inflated cube的最后一个seed作为两个对角的顶点生成初始的cube,然后计算可以膨胀的方向,直到发生碰撞终止相应方向的碰撞,然后生成inflated cube。
膨胀方向的终止,一是进入Obstacle-like semantic elements范围,二是进入Constraint-like semantic elements范围。个人认为使每一个inflated cube都在一个Constraint-like semantic elements范围内,是为了在使用分段贝塞尔曲线进行轨迹优化时,使对应的分段的贝塞尔曲线的一阶导数约束更加容易处理。
由于后续的优化问题不对每一段轨迹(贝塞尔曲线)的行驶时间进行优化,因此相邻cube的在ttt轴上依次相连的,没有间断和重合部分。
1.3.3 cube relaxation
由于一些约束是软约束,例如换道时间等,为了使后续的优化问题有足够的解空间,膨胀后的cube需要使其在sss和lll方向上进行松弛,即相邻的cube在sss和lll方向有重合部分。
论文并没有对constraint association进行解释,个人认为时空走廊主要使求解cube,constraint association是将Constraint-like semantic elements作为附加的约束添加在相应的cube上。
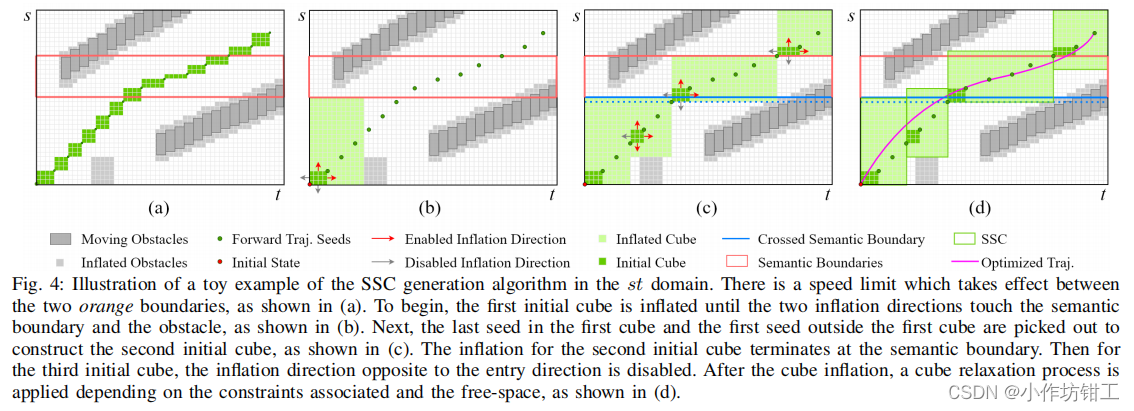
论文对时空走廊计算的示例说明如下:
2. 轨迹生成
作者表述单个五次多项式曲线不能满足复杂场景下的轨迹规划,并且多项式形式曲线不能满足复杂的碰撞约束和动力学约束。而贝塞尔曲线由于其凸包性可以很好处理碰撞约束,而 hodograph property又可以很好的处理动力学约束,因此使用分段555阶贝塞尔曲线及逆行轨迹规划。
2.1 贝塞尔曲线性质
mmm阶贝塞尔曲线f(t)f(t)f(t)可以由m+1m+1m+1个控制点pip_ipi在t∈[0,1]t \in [0,1]t∈[0,1]范围内插值表示:
f(t)=p0bm0(t)+p1bm1(t)+⋯+pmbmm(t)=∑i=0mpibmi(t) f(t) = p_0 b^0_m(t) + p_1 b^1_m(t) + \cdots + p_m b^m_m(t) = \sum^{m}_{i=0} {p_i b^i_m(t)} f(t)=p0bm0(t)+p1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3747
3747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









