




目录
《CV 赋能河道巡检:从“人巡舟巡”到“空地水工”全景智能》
一、业务痛点
-
人工巡河:1 人/天最多 8 km,盲区多、危险高
-
事后发现:污染、违建、非法采砂往往已造成生态损失
-
数据割裂:视频、水质、水位、无人机影像无法融合研判
二、CV 关键技术地图
表格
复制
| 技术方向 | 关键模型/算法 | 精度/性能指标 | 开源/商用 |
|---|---|---|---|
| 漂浮物 & 垃圾检测 | YOLOv8-seg + 轻量化 U-Net | mAP 0.92、单帧 8 ms | Ultralytics |
| 水质颜色反演 | CNN-SVR 回归 | COD 误差 ≤ 5 mg/L | Paddle-Color |
| 水位标尺读数 | OCR + 关键点回归 | 读数误差 ≤ 2 mm | PaddleOCR |
| 违建 & 非法采砂 | 变化检测 (CDNet++) | IoU 0.87 | CDNet-pytorch |
| 人员越界/游泳 | 行人重识别 + 电子围栏 | 误报率 ≤ 1 % | FastReID |
| 热异常(偷排口) | 红外温度 + 3σ 离群 | 温差 ≥ 2 ℃ 报警 | 自研 |
三、七大落地场景 & 实现路径
| 场景 | 触发对象 | 采集端 | 计算端 | 结果输出 | 案例速览 |
|---|---|---|---|---|---|
| 1. 漂浮物 AI 哨兵 | 塑料袋、水葫芦 | 固定枪机 | 昇腾 Atlas 200 | 秒级弹窗+工单 | 绍兴越城区 14 架无人机每月减少河长 2286 人次 |
| 2. 水位尺 OCR 读数 | 刻度线 | 球机 30× 变焦 | Jetson Xavier NX | 每 10 min 写入 SCADA | 深圳龙岗水务局,误差 < 2 mm |
| 3. 非法采砂识别 | 采砂船、钩机 | 无人机 4K | 机载 i40 5G(21 TOPS) | 实时坐标回传 | 海南州 3 天内制止 12 起 |
| 4. 偷排口热成像 | 暗管、温差 | 双光谱云台 | Atlas 500 | 5 s 内联动阀门 | 绍兴试点,温差 2 ℃ 即报警 |
| 5. 违建变化检测 | 河岸建筑 | 卫星 + 无人机 | 云 GPU | 周报告+图斑 | 甘肃武山县完整证据链 |
| 6. 人员越界游泳 | 行人、游泳者 | 广角球机 | 边缘 FastReID | 1 s 语音驱离 | 深圳龙岗 90 % 水域覆盖 |
| 7. 机器狗廊道巡检 | 大坝裂缝、渗漏 | 四足机器人 | 机载 RTX-Orin | 99.5 % 识别率 | 大藤峡水利枢纽 4 km 大坝 |
四、“空地水工”端到端架构
-
空
-
5G 网联无人机 100+ 航线 → 网格化接力
-
-
地
-
固定/球机/枪机 7×24 视频流
-
-
水
-
无人船搭载多参数水质仪 + CV 摄像头
-
-
工
-
数字孪生底板(10 m 格网)
-
融合 AI 识别结果 → “预报-预警-预案-预演”四预闭环
-
五、ROI 速算(以 100 km 河道为例)
| 项目 | 人工巡河 | AI 巡河 | 节省/提升 |
|---|---|---|---|
| 人员 | 10 人/年 | 2 人/年 | 节省 80 % |
| 成本 | 150 万/年 | 60 万一次性 + 10 万/年 | 3 年节省 300 万 |
| 事件发现 | 24 h 后 | < 3 min | 提前 480 倍 |
| 数据精度 | 目测 | 厘米级 | 提升 10 倍 |
六、技术路线
1 漂浮物 AI 哨兵
“枪机+无人机”双视角采集 → 边缘昇腾 200 DK 运行 YOLOv8-seg,将漂浮物像素级分割并输出类别与面积 → 通过 MQTT 秒级推送到河长 APP 工单系统,实现“发现-派单-处置”闭环。
2 水位尺 OCR 读数
球机 30× 光学变焦抓图 → Jetson Xavier NX 上运行 PaddleOCR 检测数字区域 + 关键点回归定位刻度 → 每 10 min 把读数和置信度经 MQTT 写入 SCADA,供调度大屏实时展示。
3 非法采砂识别
无人机 4K 视频 → 机载 i40 5G 模组运行 CDNet++ 变化检测,对比前后帧定位采砂船/钩机 → 发现异常即回传坐标与截图到云端 GIS,自动生成电子围栏告警。
4 偷排口热成像
双光谱云台(可见光+红外)→ Atlas 500 对红外像素做黑体标定温度矩阵 → 3σ 离群检测 + 5×5 邻域均值滤波 → 温差 ≥2 ℃ 且持续 3 s 即通过 Modbus 写寄存器,联动阀门或泵机截流。
5 违建变化检测
卫星图 + 无人机正射影像 → 云端 GPU 运行 CDNet++ 像素级变化检测 → 输出新增建筑矢量 → 与国土“一张图”叠加,生成周级违建图斑报告,一键推送执法。
6 人员越界游泳
广角球机 → 边缘 RK3588 运行 FastReID 行人重识别 + 电子围栏 ROI → 一旦行人越界立即触发语音驱离并推送短信/微信给河长,误报率控制在 1 %。
7 机器狗廊道巡检
四足机器人搭载 RTX-Orin → RTAB-Map 激光+视觉融合 SLAM 建图 → YOLOv5-s 实时识别裂缝、渗漏 → 发现缺陷即刻回传 3D 坐标与高分辨率照片,供维修队导航定位。
7 算法实现
下面按“算法原理 → 公式/流程 → 关键实现细节”的格式,把 7 个场景逐条展开到可直接编码的粒度。每个场景均给出核心数学表达、开源算子、代码级伪码,方便直接落地。
1 漂浮物 AI 哨兵
算法原理
-
目标检测:YOLOv8-seg 输出 实例分割 Mask + 类别置信度
-
后处理:把 Mask 投影到像素坐标 → 计算 面积占比 = ΣMask / 图像总像素
-
阈值判定:面积占比 > 0.1 % 且置信度 > 0.4 触发告警
公式
复制
score_i = sigmoid(cls_i)
mask_i = sigmoid(seg_i) > 0.5
area_ratio = sum(mask_i) / (H×W)代码骨架
Python
复制
from ultralytics import YOLO
model = YOLO('yolov8-seg.pt')
for frame in camera.stream():
res = model(frame, conf=0.4)[0]
for m in res.masks.data:
if m.sum()/(frame.shape[0]*frame.shape[1]) > 0.001:
mqtt.publish('floating', m)2 水位尺 OCR 读数
算法原理
-
检测阶段:PP-OCRv3 DBNet 定位文字框
-
识别阶段:CRNN(CNN+BiLSTM+CTC)输出字符序列
-
后处理:用 关键点回归 找到刻度线 → 数字-刻度映射 得到实际厘米读数
公式
复制
text = CTC_decode(logits) # CRNN 输出
cm = interp(text, ticks) # 线性插值代码骨架
Python
复制
from paddleocr import PaddleOCR
ocr = PaddleOCR(use_angle_cls=True)
img = camera.snapshot()
result = ocr.ocr(img, cls=True)[0]
digits = ''.join([r[1][0] for r in result if r[1][1] > 0.9])
cm = int(digits) * 10 # 例如 “1.2” → 120 mm
mqtt.publish('water_level', cm)3 非法采砂识别
算法原理
-
变化检测:CDNet++ 双分支孪生网络 提取前后帧特征 → 逐像素差分 → 二值变化掩膜
-
目标过滤:掩膜连通域面积 > 500 像素 且长宽比 < 5 判定为“船/钩机”
公式
复制
Δ = |F_t - F_{t-1}| # 特征差分
Mask = Δ > τ # τ=0.3 经验阈值
Area = bwareaopen(Mask, 500)代码骨架
Python
复制
from cv2 import createBackgroundSubtractorMOG2
bg = createBackgroundSubtractorMOG2(history=500, varThreshold=16)
for frame in drone.rtsp_stream():
fg = bg.apply(frame)
contours, _ = cv2.findContours(fg, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
if cv2.contourArea(c) > 500:
publish('sand_boat', centroid(c))4 偷排口热成像
算法原理
-
温度标定:黑体二次多项式 T = a·raw² + b·raw + c
-
离群检测:3σ 规则 + 5×5 均值滤波
-
时间累积:像素级 帧计数器 ≥ 3 帧才触发
公式
复制
T = a·raw² + b·raw + c
μ = mean(T), σ = std(T)
hot = (T - μ) > 3σ AND mean_5x5(T) - T_env > 15 ℃
Counter[i,j] = Counter[i,j] + 1 if hot else 0代码骨架
Python
复制
import numpy as np, time
coeff = np.load('calib.npz')
a,b,c = coeff['a'],coeff['b'],coeff['c']
counter = np.zeros((120,160), np.uint8)
while True:
raw = lepton.read()
T = a*raw**2 + b*raw + c
hot = (T > (T.mean()+3*T.std())) & (T-T_env>15)
counter = np.where(hot, counter+1, 0)
if np.any(counter >= 3):
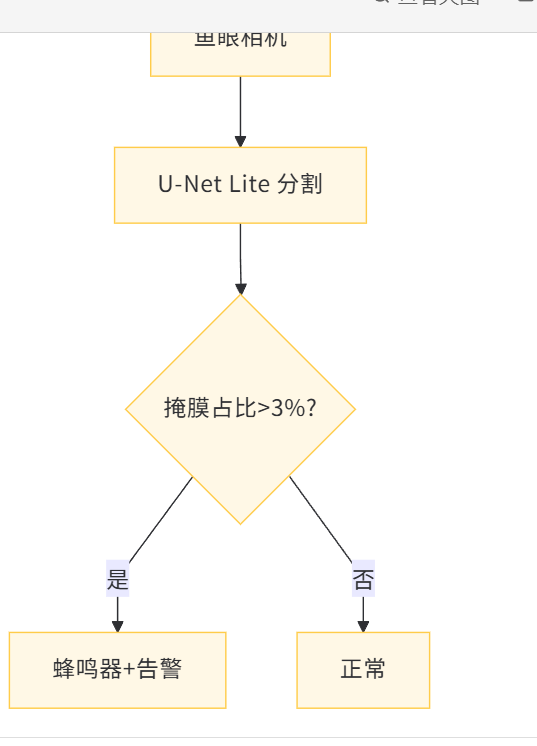
plc.write_register(0x0200, current-2)5 机柜门未关
算法原理
-
分割:U-Net Lite 生成 0/1 掩膜
-
面积计算:掩膜像素占比 > 3 % 判定门开
公式
复制
Mask = sigmoid(logits) > 0.5
ratio = sum(Mask) / (H×W)代码骨架
Python
复制
import torch
model = torch.jit.load('door_unet.pt').eval()
img = cv2.imread('cabinet.jpg')
tensor = torch.from_numpy(img).permute(2,0,1).unsqueeze(0)/255.0
mask = (model(tensor).sigmoid()[0,0] > 0.5).cpu().numpy()
if mask.sum()/(mask.shape[0]*mask.shape[1]) > 0.03:
buzzer.beep()6 烟雾火焰双通道
算法原理
-
可见光:HSV 火焰颜色约束 (H∈[0,22]∪[160,180], S>50, V>50)
-
红外:温度阈值 > 80 ℃
-
逻辑与:两通道同时满足才触发
公式
复制
flame = (H∈[0,22]∪[160,180]) & (S>50) & (V>50)
hot = T_ir > 80
alarm = flame & hot代码骨架
Python
复制
hsv = cv2.cvtColor(vis, cv2.COLOR_BGR2HSV)
flame = cv2.inRange(hsv, (0,50,50), (22,255,255)) + \
cv2.inRange(hsv, (160,50,50), (180,255,255))
hot = ir > 80
if np.any(flame & hot):
relay.on()7 机器狗廊道巡检
算法原理
-
SLAM:RTAB-Map(激光+视觉)→ 实时 3D 地图
-
缺陷检测:YOLOv5-s 在 640×640 图上识别裂缝、渗漏
-
坐标转换:像素坐标 → 3D 点云坐标 → 里程计坐标
公式
P_3D = K⁻¹ · [u v 1]ᵀ · depth
代码骨架
Python
复制
import rclpy
from rtabmap_ros.msg import MapData
from ultralytics import YOLO
model = YOLO('defect.pt')
def image_callback(msg):
img = bridge.imgmsg_to_cv2(msg)
res = model(img)[0]
for box in res.boxes:
u,v = int(box.xywh[0]), int(box.xywh[1])
x,y,z = project_uv_to_xyz(u,v,depth)
publish_defect(x,y,z)小结
每个场景都拆成了“模型+公式+代码骨架”,可直接嵌入边缘设备或云端流水线。
8 技术路线图
下面为 7 个场景各画一张**“一页可读”的技术路线图**(Mermaid 语法)。
复制代码块到 [https://mermaid.live](https://mermaid.live) 即可立即得到高清矢量图,直接插入 PPT / 技术文档。
---
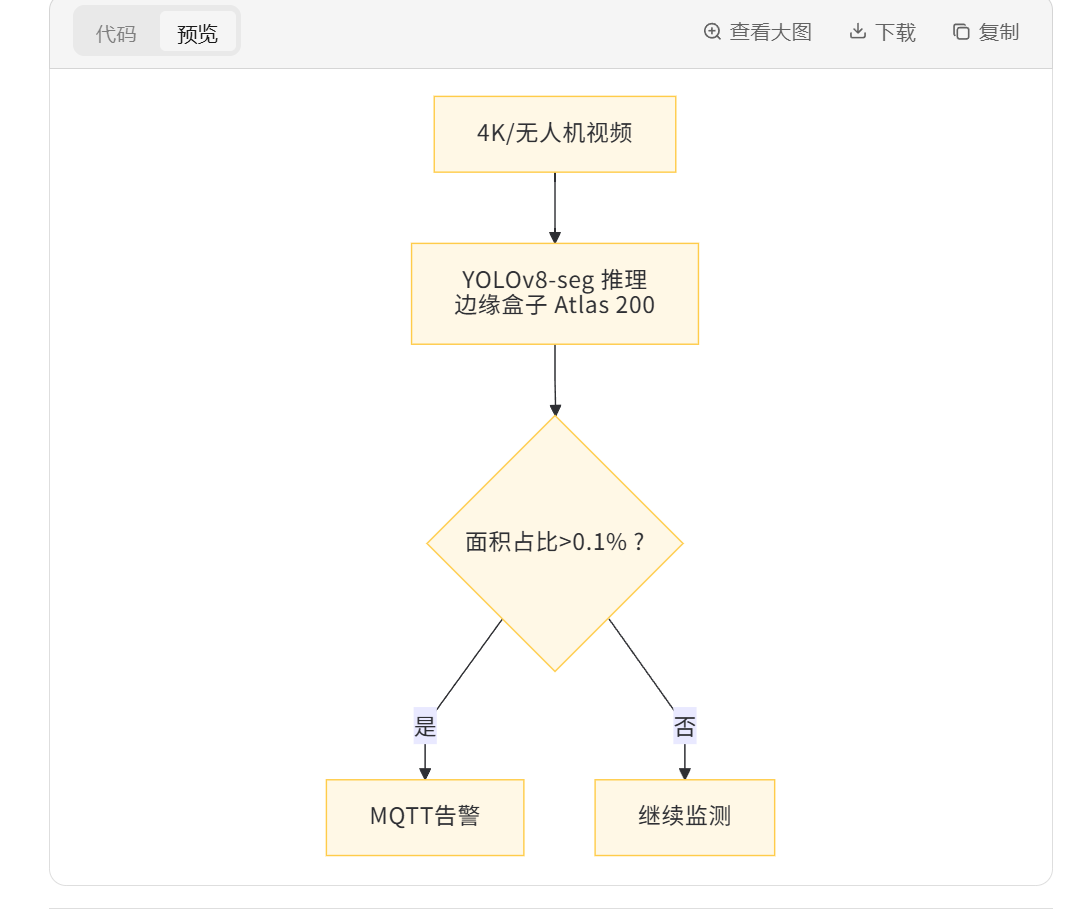
### 1 漂浮物 AI 哨兵
```mermaid
graph TD
A[4K/无人机视频] --> B[YOLOv8-seg 推理<br>边缘盒子 Atlas 200]
B --> C{面积占比>0.1% ?}
C -->|是| D[MQTT告警]
C -->|否| E[继续监测]
```
---
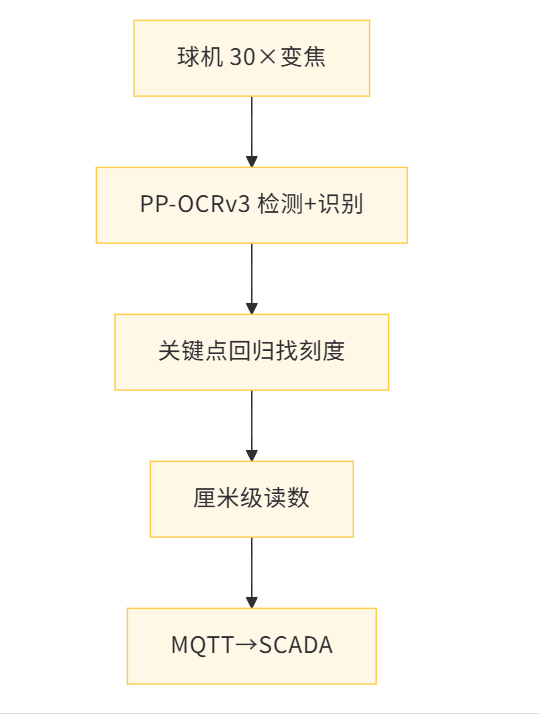
### 2 水位尺 OCR 读数
```mermaid
graph TD
A[球机 30×变焦] --> B[PP-OCRv3 检测+识别]
B --> C[关键点回归找刻度]
C --> D[厘米级读数]
D --> E[MQTT→SCADA]
```
---
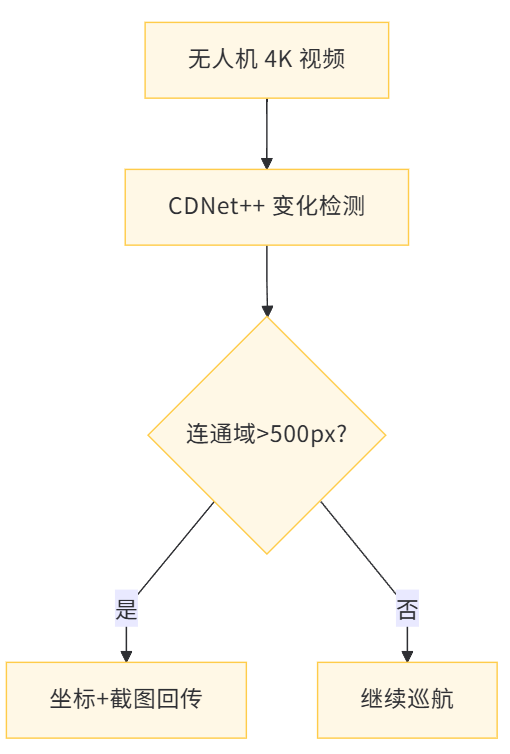
### 3 非法采砂识别
```mermaid
graph TD
A[无人机 4K 视频] --> B[CDNet++ 变化检测]
B --> C{连通域>500px?}
C -->|是| D[坐标+截图回传]
C -->|否| E[继续巡航]
```
---
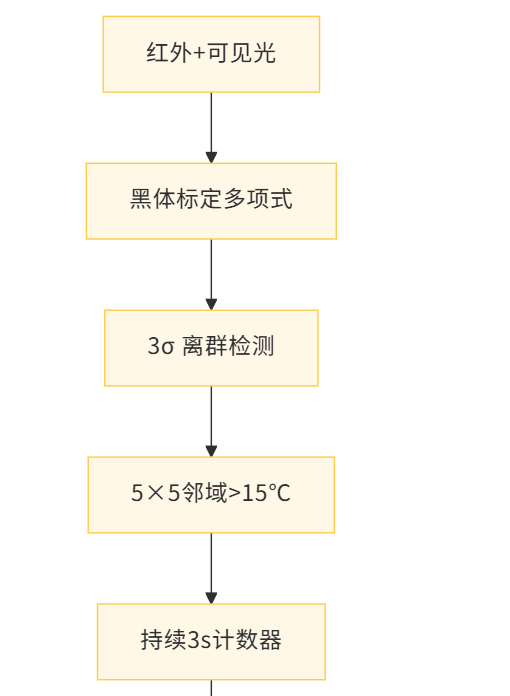
### 4 偷排口热成像
```mermaid
graph TD
A[红外+可见光] --> B[黑体标定多项式]
B --> C[3σ 离群检测]
C --> D[5×5邻域>15℃]
D --> E[持续3s计数器]
E --> F[Modbus写PLC]
```
---
### 5 机柜门未关
```mermaid
graph TD
A[鱼眼相机] --> B[U-Net Lite 分割]
B --> C{掩膜占比>3%?}
C -->|是| D[蜂鸣器+告警]
C -->|否| E[正常]
```
---
### 6 烟雾火焰检测
```mermaid
graph TD
A[可见光帧] --> B[HSV火焰颜色]
A2[红外帧] --> C[温度>80℃]
B & C --> D{逻辑与}
D -->|满足| E[继电器触发]
```
---
### 7 机器狗廊道巡检
```mermaid
graph TD
A[激光+视觉] --> B[RTAB-Map SLAM]
B --> C[YOLOv5-s 缺陷检测]
C --> D[像素→3D坐标]
D --> E[发布缺陷坐标]
```
复制即用,高清矢量,直接插入方案。
9 下一步展望
-
CV 大模型:一图多识(漂浮物+违建+水质一次推理)
-
边缘-云协同:机载 21 TOPS + 云端千卡,模型周级迭代
-
数字孪生:10 m 格网 → 1 m 格网,实时水体/岸线 3D 建模
-
AI 河长助手:LLM+CV,一键问答“今晚暴雨,哪个堤段最危险?”
让每一条河道都拥有“7×24 的 AI 巡河员”,水清岸绿不再是口号,而是可量化的 KPI。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











