 人工蜂群算法优化PID控制器在葡萄酒发酵温度控制中的应用
人工蜂群算法优化PID控制器在葡萄酒发酵温度控制中的应用





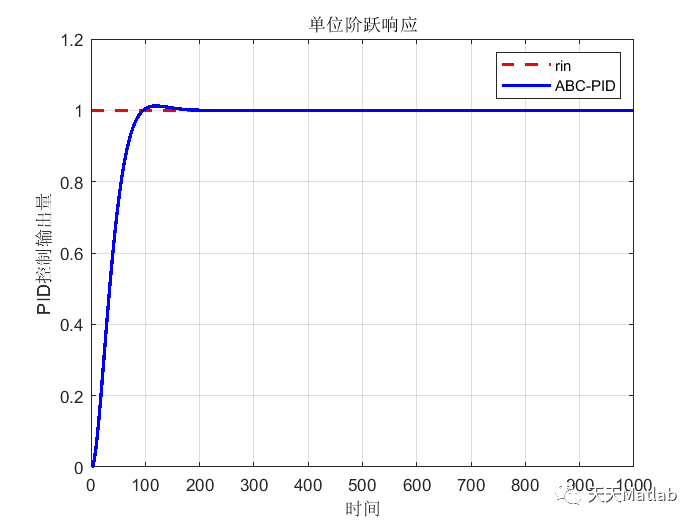
 该文探讨了将人工蜂群算法应用于PID控制器参数优化,以提升葡萄酒发酵温度控制系统的性能。通过Matlab仿真展示了算法过程,并给出了迭代优化的运行结果。研究证明了该方法的有效性。
该文探讨了将人工蜂群算法应用于PID控制器参数优化,以提升葡萄酒发酵温度控制系统的性能。通过Matlab仿真展示了算法过程,并给出了迭代优化的运行结果。研究证明了该方法的有效性。
1 内容介绍
由于PID控制器算法简单,鲁棒性强的特点,是目前使用最多的一种控制器,被广泛应用在各类工业控制领域.将基于人工蜂群算法的PID参数优化,在葡萄酒发酵温度控制系统中的应用进行了深入研究.
2 部分代码
clc;
clear;
close all;
%% Problem Definition
CostFunction=@(x) Sphere(x); % Cost Function
nVar=5; % Number of Decision Variables
VarSize=[1 nVar]; % Decision Variables Matrix Size
VarMin=-10; % Decision Variables Lower Bound
VarMax= 10; % Decision Variables Upper Bound
%% ABC Settings
MaxIt=200; % Maximum Number of Iterations
nPop=100; % Population Size (Colony Size)
nOnlooker=nPop; % Number of Onlooker Bees
L=round(0.6*nVar*nPop); % Abandonment Limit Parameter (Trial Limit)
a=1; % Acceleration Coefficient Upper Bound
%% Initialization
% Empty Bee Structure
empty_bee.Position=[];
empty_bee.Cost=[];
% Initialize Population Array
pop=repmat(empty_bee,nPop,1);
% Initialize Best Solution Ever Found
BestSol.Cost=inf;
% Create Initial Population
for i=1:nPop
pop(i).Position=unifrnd(VarMin,VarMax,VarSize);
pop(i).Cost=CostFunction(pop(i).Position);
if pop(i).Cost<=BestSol.Cost
BestSol=pop(i);
end
end
% Abandonment Counter
C=zeros(nPop,1);
% Array to Hold Best Cost Values
BestCost=zeros(MaxIt,1);
%% ABC Main Loop
for it=1:MaxIt
% Recruited Bees
for i=1:nPop
% Choose k randomly, not equal to i
K=[1:i-1 i+1:nPop];
k=K(randi([1 numel(K)]));
% Define Acceleration Coeff.
phi=a*unifrnd(-1,+1,VarSize);
% New Bee Position
newbee.Position=pop(i).Position+phi.*(pop(i).Position-pop(k).Position);
% Evaluation
newbee.Cost=CostFunction(newbee.Position);
% Comparision
if newbee.Cost<=pop(i).Cost
pop(i)=newbee;
else
C(i)=C(i)+1;
end
end
% Calculate Fitness Values and Selection Probabilities
F=zeros(nPop,1);
MeanCost = mean([pop.Cost]);
for i=1:nPop
F(i) = exp(-pop(i).Cost/MeanCost); % Convert Cost to Fitness
end
P=F/sum(F);
% Onlooker Bees
for m=1:nOnlooker
% Select Source Site
i=RouletteWheelSelection(P);
% Choose k randomly, not equal to i
K=[1:i-1 i+1:nPop];
k=K(randi([1 numel(K)]));
% Define Acceleration Coeff.
phi=a*unifrnd(-1,+1,VarSize);
% New Bee Position
newbee.Position=pop(i).Position+phi.*(pop(i).Position-pop(k).Position);
% Evaluation
newbee.Cost=CostFunction(newbee.Position);
% Comparision
if newbee.Cost<=pop(i).Cost
pop(i)=newbee;
else
C(i)=C(i)+1;
end
end
% Scout Bees
for i=1:nPop
if C(i)>=L
pop(i).Position=unifrnd(VarMin,VarMax,VarSize);
pop(i).Cost=CostFunction(pop(i).Position);
C(i)=0;
end
end
% Update Best Solution Ever Found
for i=1:nPop
if pop(i).Cost<=BestSol.Cost
BestSol=pop(i);
end
end
% Store Best Cost Ever Found
BestCost(it)=BestSol.Cost;
% Display Iteration Information
disp(['Iteration ' num2str(it) ': Best Cost = ' num2str(BestCost(it))]);
end
%% Results
figure;
%plot(BestCost,'LineWidth',2);
semilogy(BestCost,'LineWidth',2);
xlabel('Iteration');
ylabel('Best Cost');
grid on;
img =gcf; %获取当前画图的句柄
print(img, '-dpng', '-r600', './运行结果.png') %即可得到对应格式和期望dpi的图像
3 运行结果

4 参考文献
[1]马步云, 赵世海. 基于人工蜂群算法的PID控制技术应用研究[J]. 机械管理开发, 2016, 31(002):24-26.
[2]胡海涛, 高嵩, 陈超波,等. 一种改进人工蜂群的分数阶PID控制器优化算法[J]. 计算机测量与控制, 2017(7).
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机、雷达通信、无线传感器等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。


















 983
983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











