




 本文介绍了微多普勒效应在雷达目标识别中的应用,通过分析目标的微动产生的额外频移,可以提取目标的动态特性。文中提到的代码示例展示了如何模拟人类行走时的雷达回波,进一步处理这些回波以获取目标信息。通过这种方式,可以识别目标类型、状态,并估计其运动参数,如车辆的类型、速度等。
本文介绍了微多普勒效应在雷达目标识别中的应用,通过分析目标的微动产生的额外频移,可以提取目标的动态特性。文中提到的代码示例展示了如何模拟人类行走时的雷达回波,进一步处理这些回波以获取目标信息。通过这种方式,可以识别目标类型、状态,并估计其运动参数,如车辆的类型、速度等。
1 简介
目标的运动特征可以由多普勒效应所反映,以单基地雷达为例,由于目标的平移造成的多普勒频移fD与目标速度 v 的关系为:D-2/fv/λ ,其中v为雷达与目标之间的相对速度,λ是雷达的波长,其数值为光速与雷达载 频fc之比。如果雷达没有运动,那么v就是径向速度,即目标速度在雷达 LOS上的投影分量。可以看出 fD 与 v 成正比关系且符号相反。
如果目标本身或其上的任何结构在平移的基础上还有微动存在,则除目标由于平动产生的多普勒平移外还会产生额外的微多普勒频移,即关于目标多普勒频移的侧带。这种现象被称为微多普勒效应。设一个目标以恒定速度v平移,则由于目标的平动产生的多普勒频移是不随时间变换的。若该目标还有微动存在,那么就会对回波的载频进行调制,产生频谱的展宽,且这种调制是周期的、时变的。微动目标的雷达回波中包含与目标结构相关的微多普勒特征。目标的动态特性可以通过微多普勒特征反映出来,这为目标特征的提取及参数估计提供了新的方法。比如利用车辆行驶中的微多普勒效应可以用来判断它的类型,并确定它们的运动和发动机的速度。车辆发动机产生的振动可以通过从车辆表面返回的雷达信号探测到。因此,在完成对雷达目标的检测基础上,可以通过分析目标的雷达回波信号,对目标种类、状态等信息进行确定以达到目标参数估计的目的。
2 部分代码
<span style="color:#333333"><span style="background-color:rgba(0, 0, 0, 0.03)"><code> </code><code><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span>%</code><code></code><code>%</code><code><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span>%</code><code></code><code>clear all</code><code></code><code>% human walking model</code><code>showplots = <span style="color:#dd1144">'n'</span>; % show translation <span style="color:#ca7d37">and</span> rotation of body segments</code><code>formove = <span style="color:#dd1144">'y'</span>; % forward walking</code><code>animove = <span style="color:#dd1144">'y'</span>; % display animation</code><code>genmovie = <span style="color:#dd1144">'n'</span>; % generate movie file</code><code></code><code>% relative velocity <span style="color:#ca7d37">defined</span> by average walking velocity normalized by the</code><code>% height from the toe to the <span style="color:#dd1144">hip:</span> Ht</code><code>rv = <span style="color:#0e9ce5">1.0</span>; % relative velocity (from <span style="color:#0e9ce5">0</span> to <span style="color:#0e9ce5">3</span>)</code><code>nt = <span style="color:#0e9ce5">2048</span>; % number of frames per cycle</code><code><span style="color:#ca7d37">if</span> mod(nt,<span style="color:#0e9ce5">2</span>) == <span style="color:#0e9ce5">1</span></code><code> nt = nt+<span style="color:#0e9ce5">1</span>;</code><code><span style="color:#ca7d37">end</span></code><code>numcyc = <span style="color:#0e9ce5">3</span>; % number of cycle</code><code>Height = <span style="color:#0e9ce5">1.8</span>;</code><code></code><code>[segment,seglength,T] = HumanWalkingModel(showplots, formove,...</code><code> animove, genmovie, Height, rv, nt, numcyc);</code><code> </code><code>[data,TF] = RadarReturnsFromWalkingHuman(segment,seglength,T);</code><code></code><code><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%%</span><span style="color:#dd1144">%%</span></code></span></span>
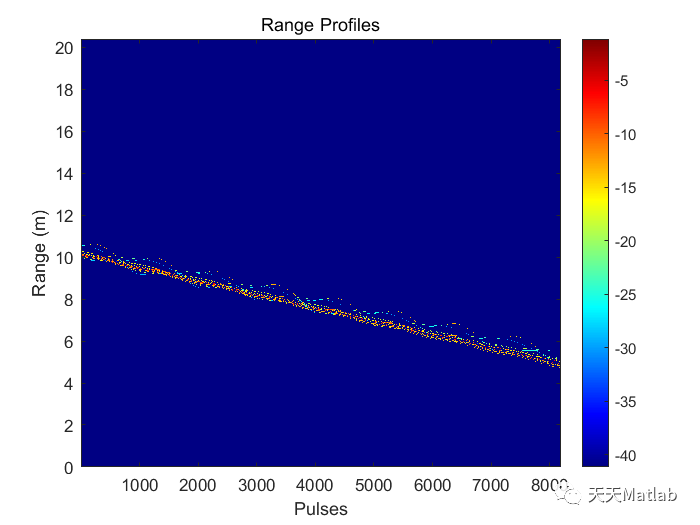
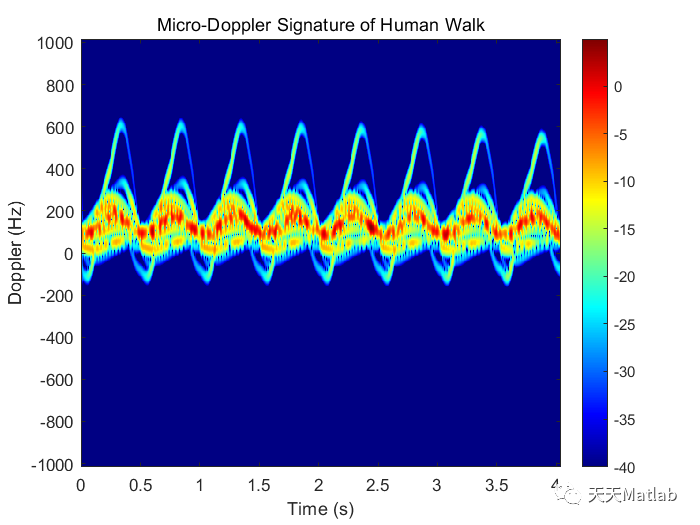
3 仿真结果
4 参考文献
[1]郎需强. 基于微多普勒效应的昆虫运动雷达回波特性研究[D]. 山东农业大学, 2014.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。


















 650
650


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










