







1.空间站的创建
引:创建ROS项目首先需要创建一个catkin工作空间,在catkin功罪空间中
步骤:
(1)创建catkin_ws文件夹,里面再创建src目录
mkdir -p ~/catkin_ws/src
(2)进入 src 目录,初始化空间站
cd ~/catkin_ws/src
catkin_init_workspace
(3)返回catkin_ws目录,编译工作空间
cd ~/catkin_ws
catkin_make
这样就完成了一个空间站的创建。
打开:可以发现产生了3个文件夹。
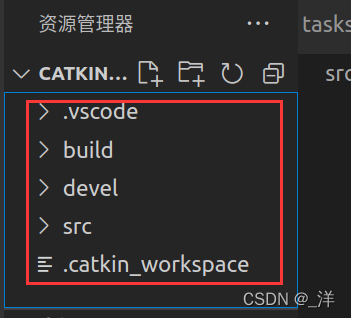
build:放置程序编译的一些中间文件
devel:放一些可执行文件以及环境变量配置的脚本文件
src:放程序代码、功能包
2.接下来是包的创建
(5)创建包
cd src
catkin_create_pkg test_pkg roscpp rospy std_msgs
roscpp rospy std_msgs是包的依赖
(6)回到空间站目录,再次编译,产生功能包
cd ..
catkin_make
(7)设置工作空间的环境变量
source devel/setup.bash
设置完环境变量之后系统才能找到对应的功能包。
验证,查找功能包看是否可以输出相应的路径:
输入:
echo $ROS_PACKAGE_PATH
如果输出对应的路径证明环境变量配置成功
两个文件:package.xml:功能包的一些信息,功能包的依赖信息
cmake_list.txt:用来描述功能包的一些编译规则。

















 1943
1943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









