







MoveIt Setup Assistant 可视化配置(marm)
机械臂有夹爪和相机怎么办
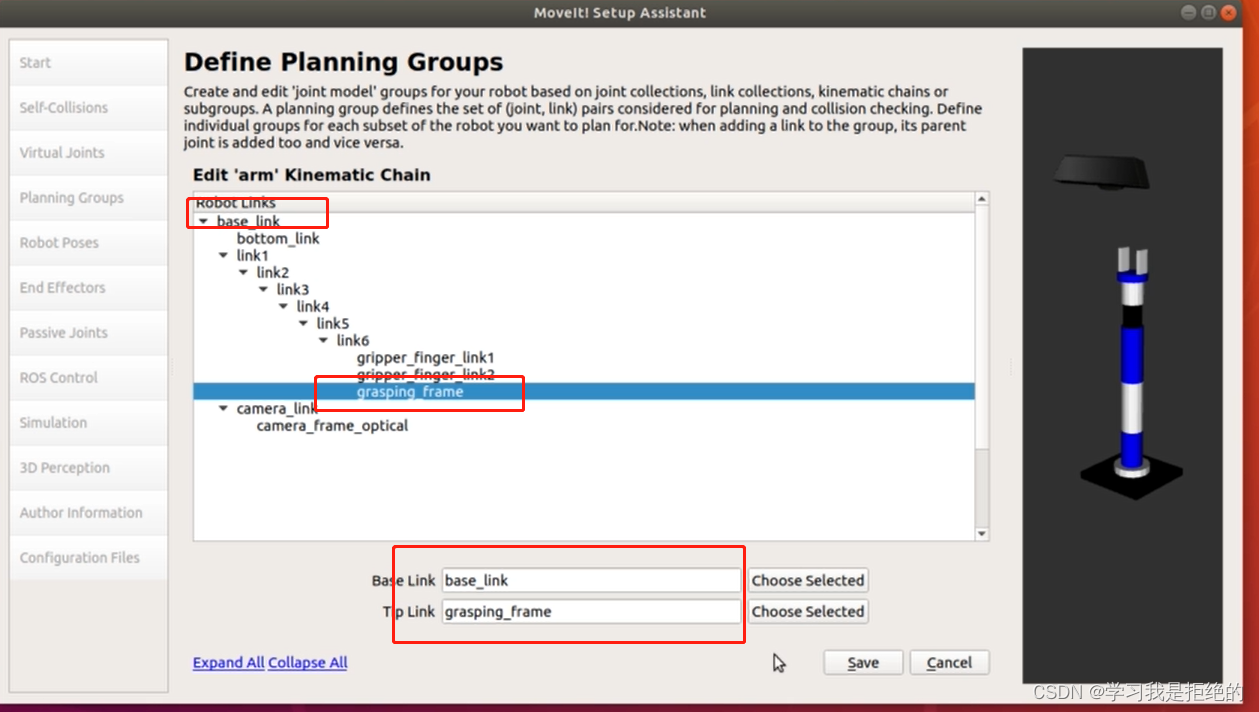
规划组配置先配置本体
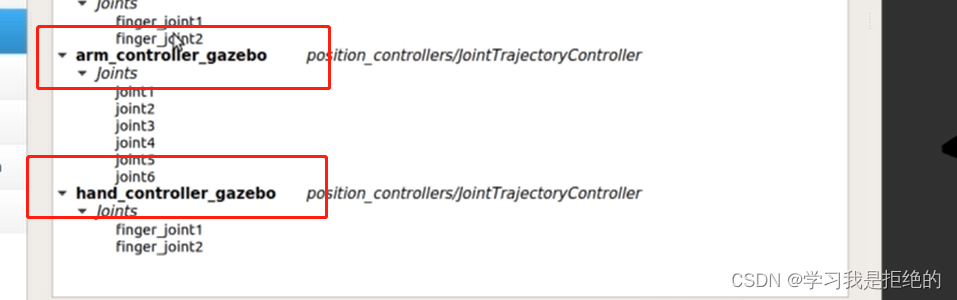
夹爪和本体是分离的有两套控制器是两个对象
以为是两个夹爪,不需要任何的求解,求解器不用选,时间不用选。
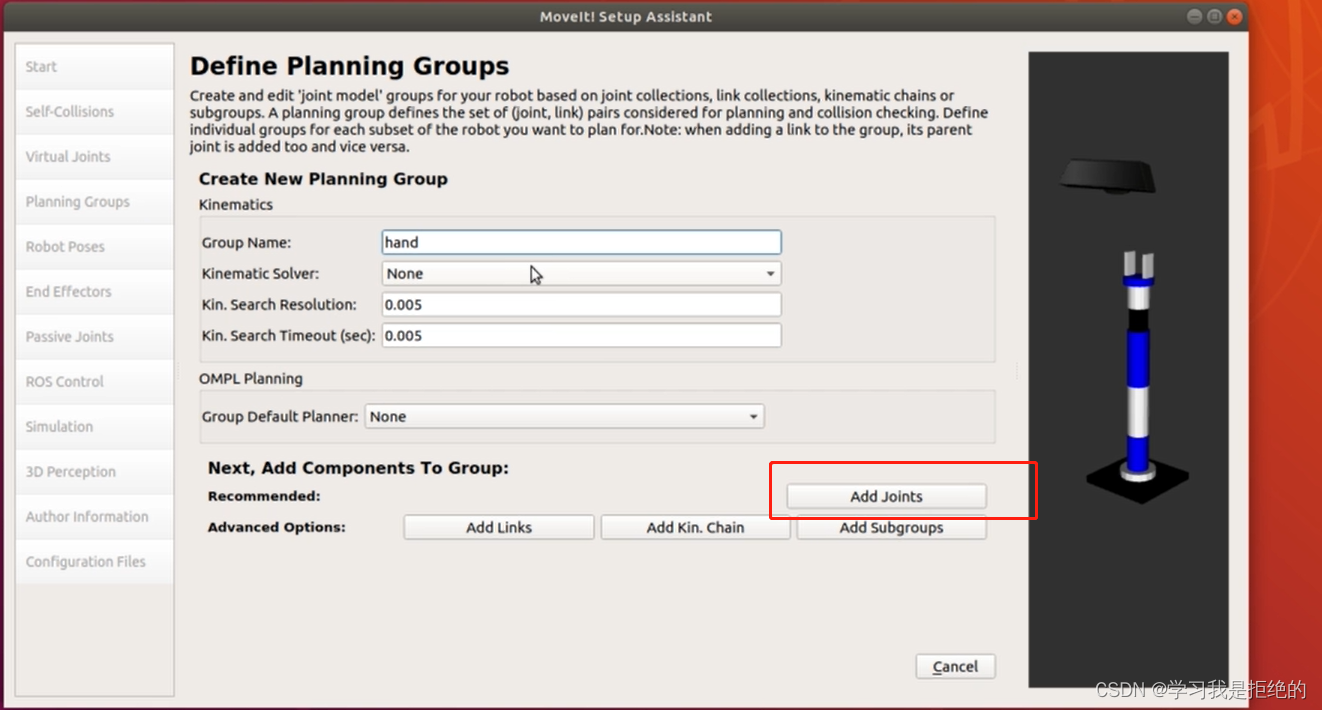
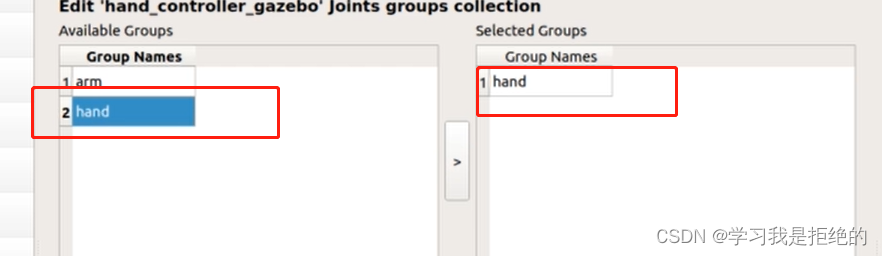
需要addjoint
把夹爪要运动的关节告诉他
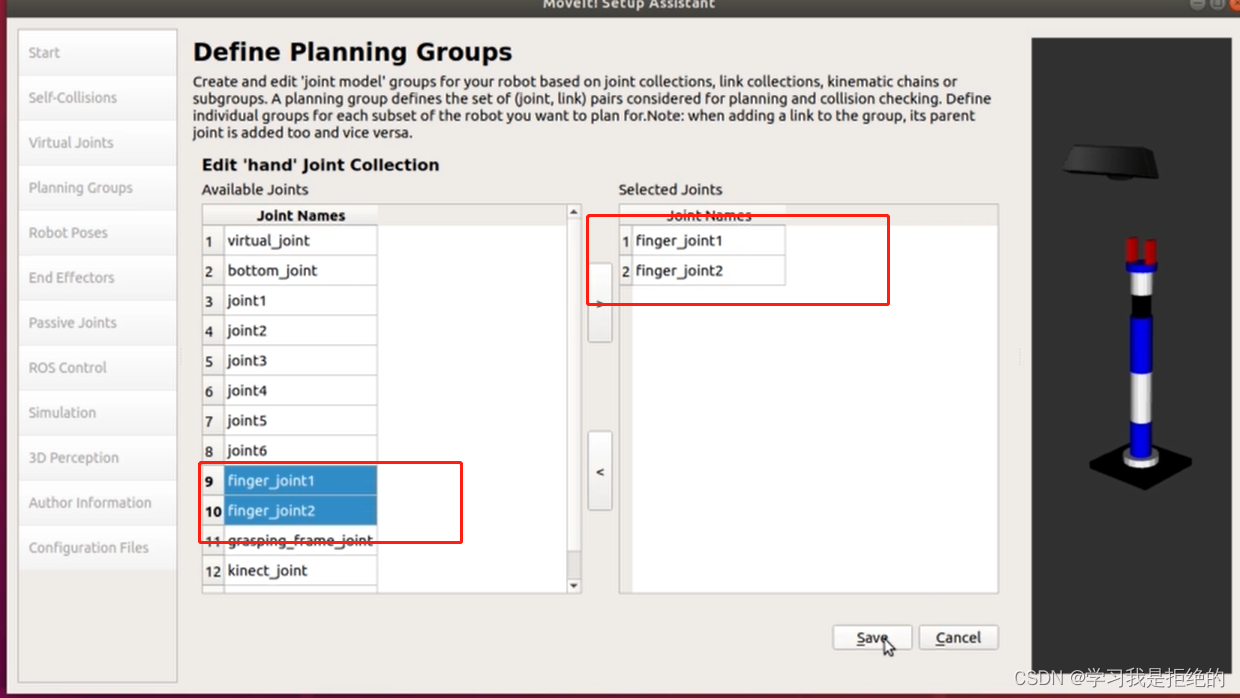
知道这个组里面有哪两个关节在动就可以了
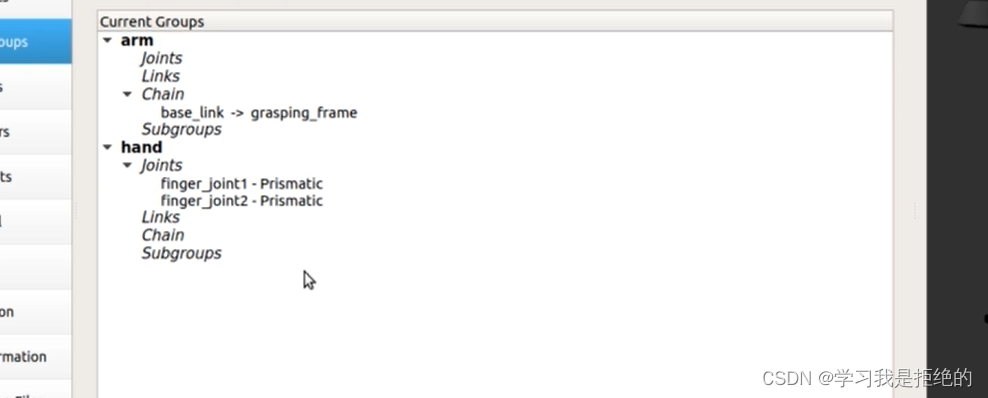
两个规划组的配置
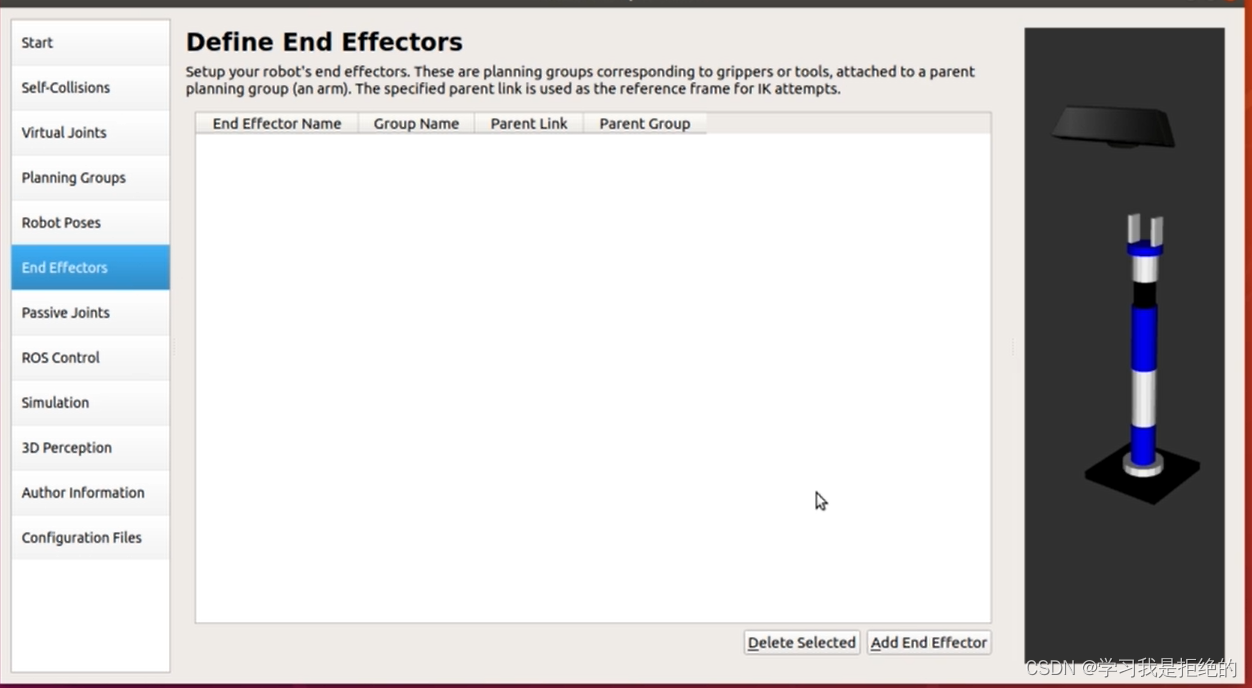
有夹爪了也是需要做配置的。
要让moveit知道这个东西是夹爪。
夹爪是在link6上面的。

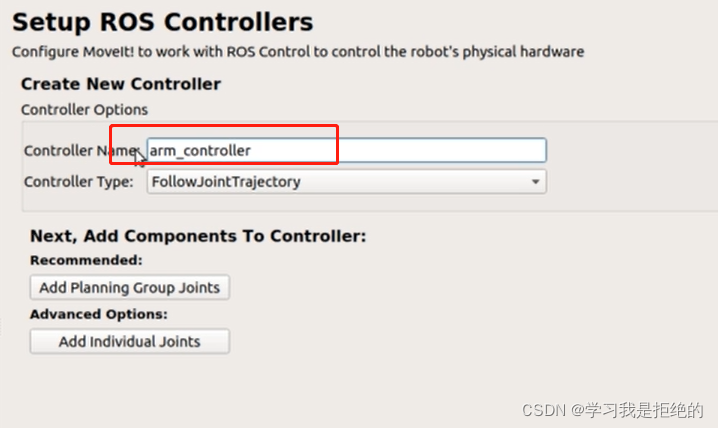
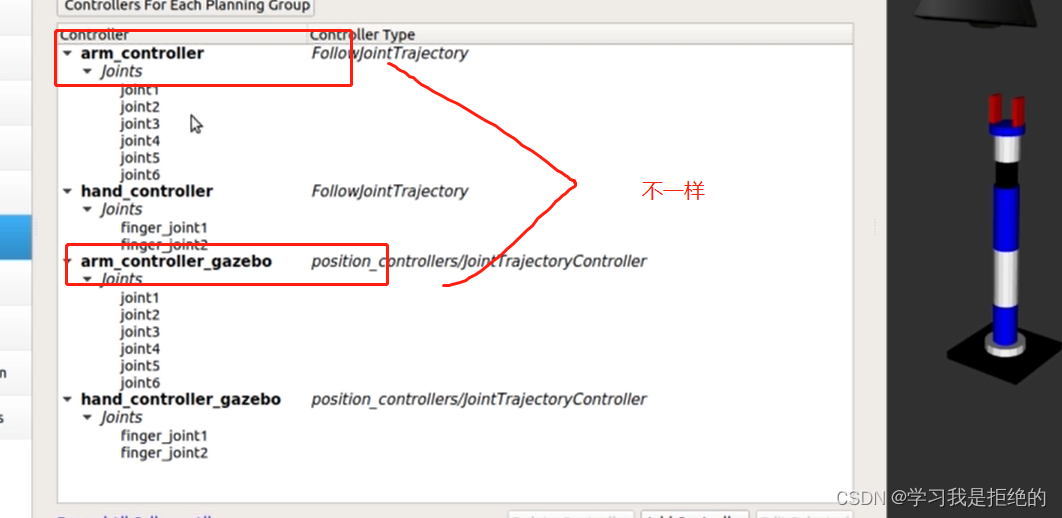
收的控制器的名字后面可能需要注意下
名字是不能重名的。
可以先这样后续会改的
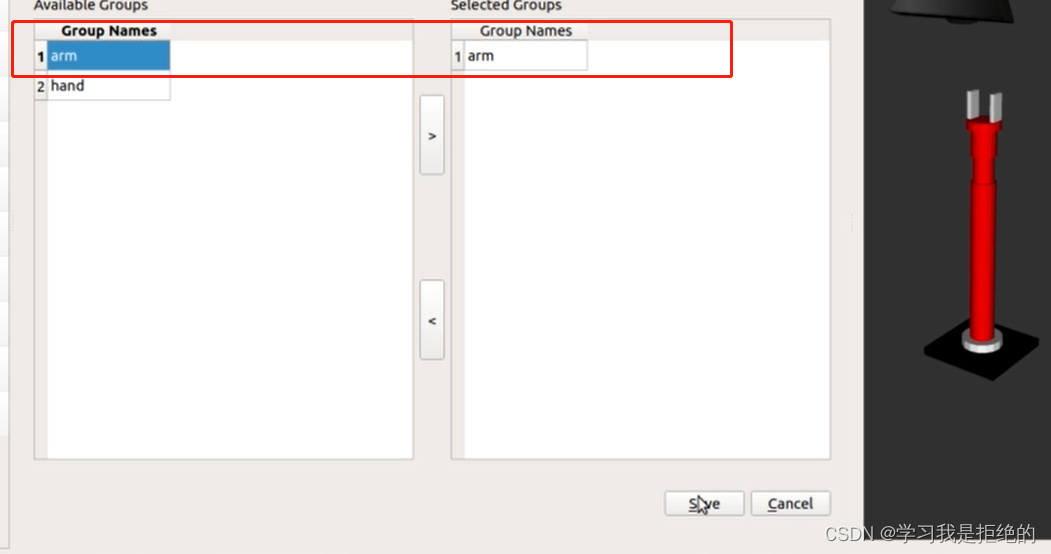
规划组是arm
对夹爪也需要做一次配置
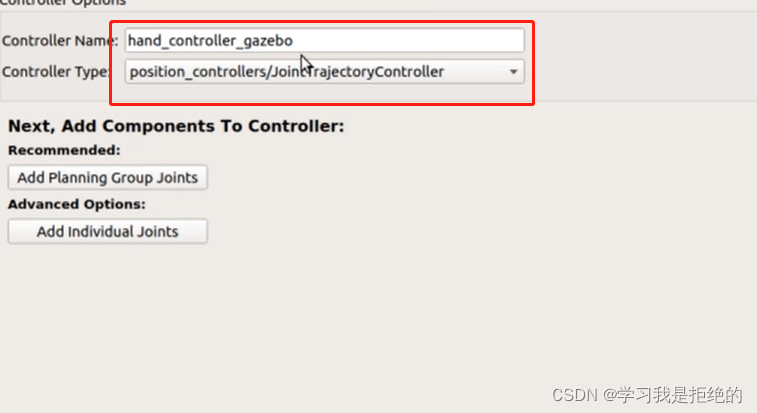
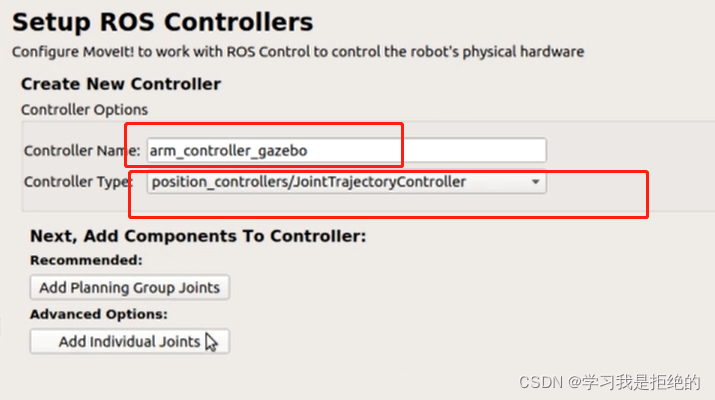
后面需要对这些名字做一个修改。
以为在配置文件里面,会把名字当成是命名空间,如果发现这个两个控制器的命名空间不一样,他的借口会借不到一起。后面需要做修改
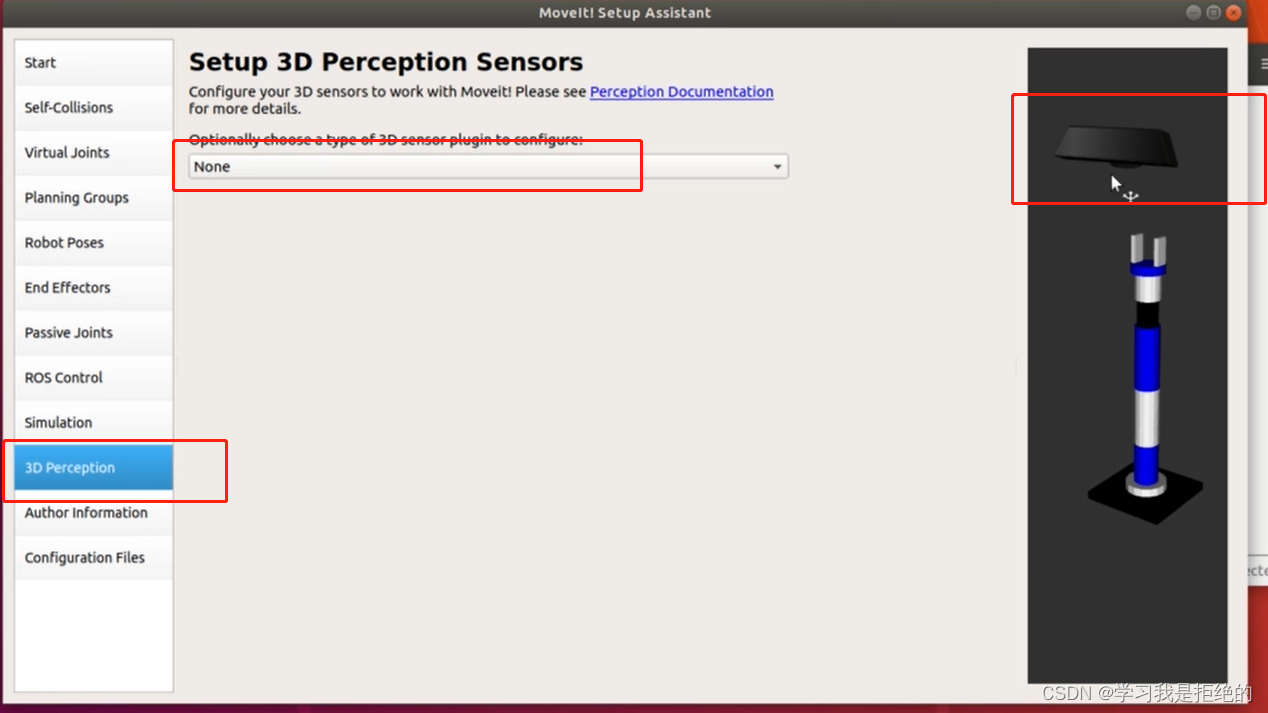
对相机的配置
有一个kinet了,这相机采集的是点云信息
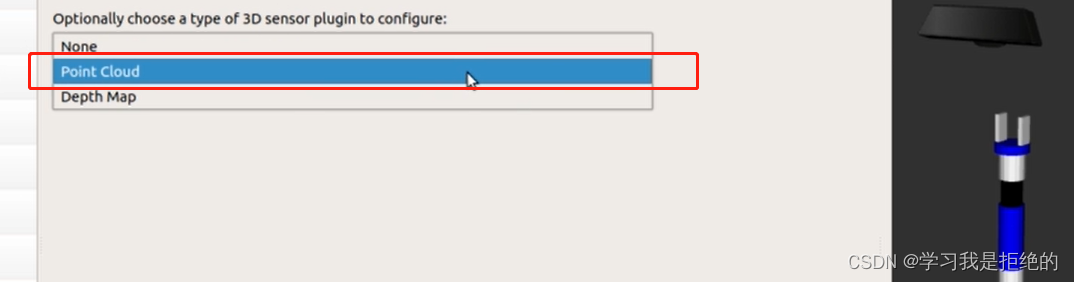
改成点云
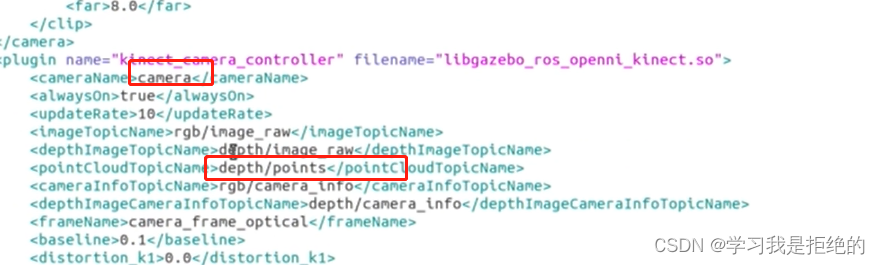
需要设计话题topic
就是moveit从哪里获取摄像机数据
是通过话题来获取的。
在urdf坊镇里面已经设置好的一个名字


















 783
783

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









