









目录
本章介绍生成根轨迹图并从这些图形获得相关信息的MATLAB方法。
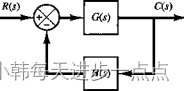
对于上述系统,它的闭环传递函数为
令右端的分母为0,得到系统的闭环特征方程,即:
多数情况下, 包含参数增益K,将其表示成零极点形式,则特征方程为
或者写成
则有
即系统的根轨迹方程。
根据这两个式子确定系统的相角条件和幅值条件。
同时满足幅角条件和幅值条件的s值就是特征方程的根,或者说闭环极点。只满足幅角条件 的点在复平面上的轨迹是根轨迹。系统的根轨迹是闭环极点在增益K从0变化到无穷大时的轨迹。
绘制根轨迹
通常用来绘制根轨迹的MATLAB命令是
rlocus(num,den)
该命令在屏幕上绘制根轨迹图。增益K的值是自动确定的(向量K包含了为其计算闭环极点的所有增益值)。
对以状态空间形式定义的系统,rlocus(A, B. C, D)按照自动确定的增益向量来绘制该系统的根轨迹。
应注意的是,命令
rlocus(num,den,K)和 rlocus(A,B,C,D,K) 可以采用用户提供的增益向量K来绘制根轨迹。
如果调用命令时带有左端参数,如
[r,K] = rlocus(num,den)
[r,K] = rlocus(num,den,K)
[r,K] = rlocus(A,B,C,D)
[r,K] = rlocus(A,B,C,D,K)
[r,K] = rlocus(sys)
那么屏幕上将会显示矩阵r和增益向量K( r的行数等于K的长度,列数为n,这里n是分母的次数。r包含根的位置,矩阵r的每一行对应于向量K中的一个增益。绘图命令
plot(r,'-')
可以绘制根轨迹。
最后要注意,由于增益向量是自动确定的,所以
的根轨迹图完全相同。对这3个系统而言,系统的num和den都是一样的。
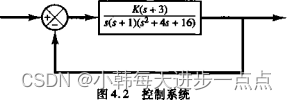
已知系统如图所示。用正方形的平面形状来绘制根轨迹,使斜率为1的直线正好为.现将根轨迹的绘制区间选为
其中x和y分别是实轴坐标和虚轴坐标。
新建脚本文件:
%a=s(s+1): b=s^2+4s+16
a=[1 1 0];
b=[1 4 16];
%conv(a,b)是给出两个多项式a和b的乘积
c=conv(a,b);
den=[1 5 20 16 0];
num=[1 3];
r=rlocus(num,den);
plot(r,'-');
%将给定的屏幕绘图设置成正方形
plot(r,'-');v=[-6 6 -6 6];axis(v);axis('square')
grid
title('Root-Locus Plot of G(s) = K(s+3)/[s(s + 0.5)(s^2+4s+16)]')
xlabel('Real Axis');ylabel('lmagAxis')
%可以做figure上手动标注出零极点位置
gtext('o')
gtext('x')
gtext('x')
gtext('x')
gtext('x')
已知系统结构为:
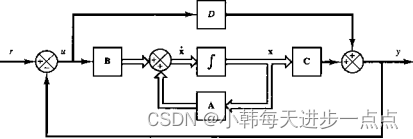
可以采用命令:
[num,den] = ss2tf(A,B,C,D)
转换为上述形式求解。
同样,这个系统的根轨迹图可以利用MATLAB命令
rlocus(A,B,C,D)
来绘制。
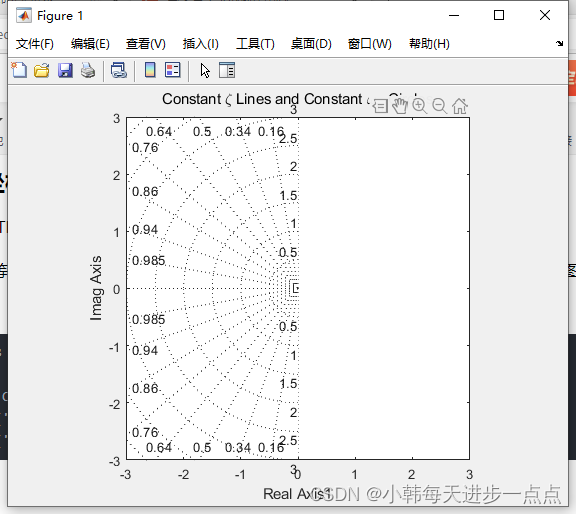
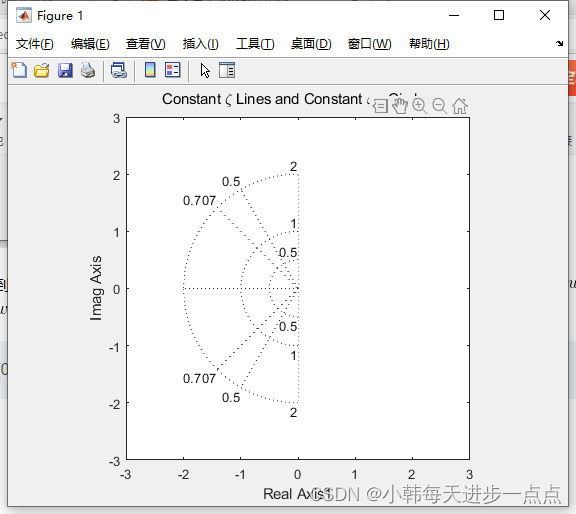
带有极坐标网格线的根轨迹图
为了利用MATLAB在根轨迹图上绘制等直线轨迹和等
圆轨迹,可以采用命令sgrid。
命令sgrid将等阻尼系数( = 0 ~ 1,步长0. 1)的直线轨迹和等
的圆轨迹重叠绘制在根轨迹图上。
>> v = [-3 3 -3 3]; axis(v); axis('square')
>> sgrid
>> title('Constant \zeta Lines and Constant \omega_n Circles')
>> xlabel('Real Axis1')
>> ylabel('Imag Axis')得到图形:
如果希望得到特定的的直线轨迹(如
=0.5的直线和
=0. 707的直线)及特定的殊的圆轨迹(如
=0.5的圆、
=1的圆和
=2的圆),可以采用如下命令:
>> sgrid([0.5, 0.707], [0.5, 1, 2])
如果希望将等直线轨迹和等
圆轨迹重叠到系统
num = [0 0 0 1]
den = [1 4 5 0]
的根轨迹图上,只需要在原先绘制根轨迹代码的基础上加上代码
>> sgrid([0.5, 0.707], [0.5, 1, 2])
如果要删去全部等直线轨迹或全部等
圆轨迹,就可以在命令sgrid的参数中采用空括号[]。如果只希望在根轨迹图上重叠与
=0.5相应的等阻尼系数直线,而不需要等
圆,就可以采用命令
sgrid(0.5,[])
求根轨迹上任意点的增益值K
求根轨迹上任意点的増益K。在闭环系统的MATLAB分析中,经常希望求根轨迹上任意 点的增益值K。这可以采用命令
[K,r] = rlocfind(num, den)或[K, r] = rlocfind(A,B,C,D)
之一来完成,其中r是闭环极点。命令rlocfind(必须在rlocus之后调用)将可移动的x-y坐标 系覆盖在屏幕上。使用鼠标将价x-y坐标系的原点置于根轨迹上希望的点并按鼠标键,MATLAB 就会显示该点的坐标、该点的增益值及与该增益值对应的闭环极点。
如果所选的点不在根轨迹上,那么命令rlocfind就给出该点的坐标、该点的增益值及与这个K 值相应的闭环极点位置。注意,s平面上的每个点都对应一个增益值。
>> num = [1];
>> den = [1 4 5 0];
>> r = rlocus(num,den);
>> plot(r,'-'); v = [-3 1 -2 2]; axis(v); axis('square')
>> grid
>> sgrid(0.5,[])
>> [K,r] = rlocfind(num,den)非最小相位系统的根轨迹图
非最小相位系统。如果系统的所有极点和零点都位于左半S平面,该系统就称为最小相 位系统。如果系统至少有一个极点或零点位于右半S平面,该系统就称为非最小相位系统。 之所以要采用非最小相位系统这一术语,与该系统在正弦输入下的相移特性有关。
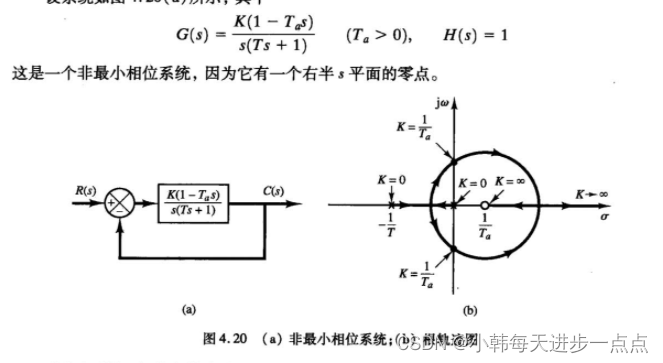
如果T = 1 s, Ta=0.5 s,那么就可以在程序中输入如下
num = [-0.5 1];
den = [1 1 0];
K1 =0:0.01:30;
K2 =30:1:100;
K3 = 100:5:500;
K = [K1 K2 K3];
r = rlocus(num,den,K);
plot(r); v = [-2 6 -4 4]; axis(v); axis('square')
grid
title('Root-Locus Plot of G(s) = K(1-0.5s)/[s(s+1)]')
xlabel('Real Axis'); ylabel('Imag Axis');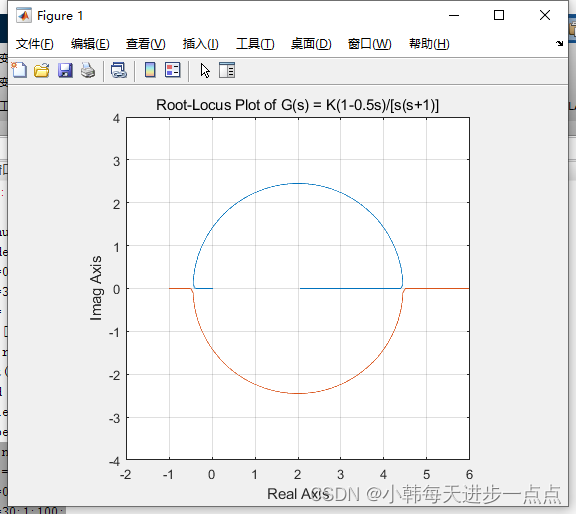
条件稳定系统的根轨迹图
绘制方法同上,利用劳斯判据判断条件稳定条件。
具有传输时延的系统的根轨迹
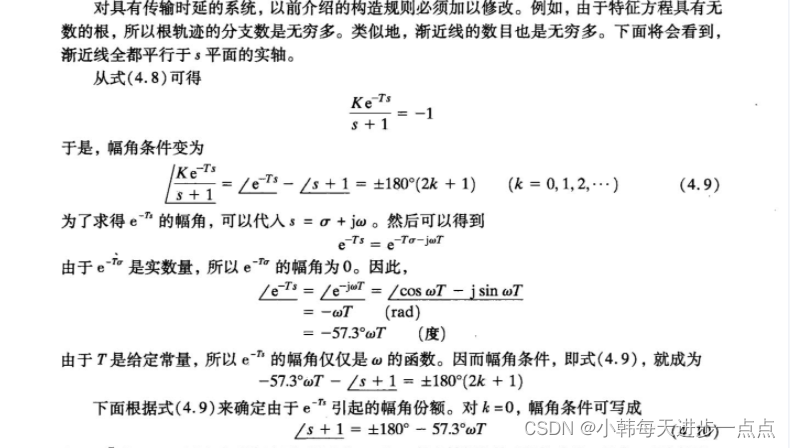
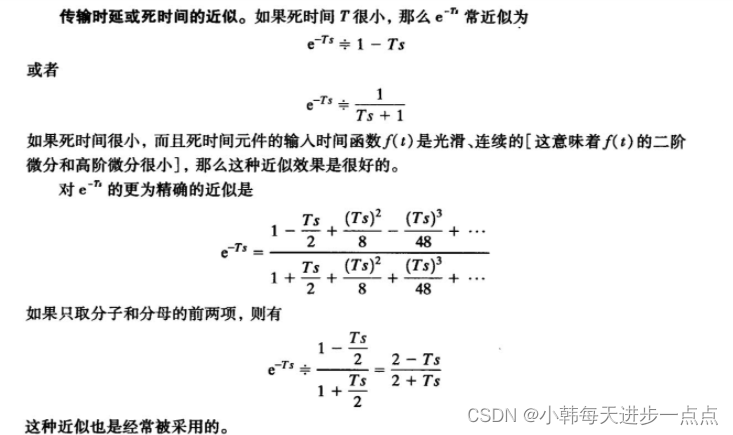
死时间的MATLAB近似。
为了处理死时间,MATLAB采用以法国数学家Henri EugfenePad&命名的帕代近似。例如,如果T = 0.1 s,采用三阶传递函数来近似
则可以在计算机 中输入如下MATLAB程序:
>> [num,den] = pade(0.1,3);
printsys(num, den, 's')
num/den =
-1 s^3 + 120 s^2 - 6000 s + 120000
----------------------------------
s^3 + 120 s^2 + 6000 s + 120000类似地,当T = 0.1s时,四阶传递函数近似的程序是
[num,den] = pade(0.1, 4);
printsys(numz den, 's')控制系统校正的根轨迹方法
控制系统的基本设计方面主要是用解析手段完成的,只有少部分可以采用MATLAB进行。 但是,系统设计一旦完成,就必须仔细检査数学模型的响应特性。MATLAB在这方面会起重要作用。
采用根轨迹方法的串联校正技术(如超前校正、滞后校正和超前滞后校正),以及采用根 轨迹方法的并联校正技术。
我是小韩每天进步一点点,一名研0的研究生,刚开始写博客。希望和大家多多交流,一起进步!
求朋友点赞、收藏、关注哈,鼓励一下新人博主,或者提出建议。

















 5870
5870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









