




NIMC2000N-L系列运动控制器是一款高性价比运动控制设备,搭载NIMCS2000编程系统并全面支持IEC61131-3编程标准,集标准伺服同步运动控制、工业机器人运动控制及可编程逻辑控制于一体。
该控制器具备 强大的处理能力和丰富的外设功能 ,支持PROFINET、EtherCAT、Ethernet/IP等实时以太网协议,兼容CANopen、MODBUSRTU/TCP等主流现场总线,同时通过OPCUA、TCP/UDP协议实现工业物联网无缝对接。机身 集成多路工业通信接口 ,包括2路隔离485、2路隔离CAN、2路RS232、2个USB和2个千兆以太网口,确保设备互联畅通无阻。可满足自动化设备与机器人运动控制需求。
● 搭载NIMCS2000编程系统
该运动控制器采用NIMCS2000编程系统,提供强大的开发环境和灵活的编程能力,显著提升开发效率。用户可快速完成复杂控制逻辑的编写与调试,同时享受丰富的功能模块支持,满足多样化工业自动化需求。
● 支持IEC61131-3编程标准

严格遵循IEC61131-3国际编程标准,支持梯形图(LD)、结构化文本(ST)、功能块图(FBD)等多种编程语言,降低工程师学习成本。标准化编程接口确保代码可移植性和可维护性,适用于不同行业和设备的自动化控制。
● 伺服同步运动控制
具备高精度的多轴伺服同步控制能力,支持电子齿轮、电子凸轮等高级运动模式,实现复杂轨迹规划和精准同步。适用于高速高精度加工、包装、印刷等场景,显著提升设备动态性能与生产效率。
● 支持主流工业通信
集成EtherCAT、PROFINET、Modbus等主流工业总线协议,确保与PLC、HMI、驱动器的无缝通信。开放的网络架构便于设备集成和系统扩展,满足智能制造中多设备协同的需求。
● 工业机器人运动控制

专为工业机器人设计,支持关节空间与笛卡尔空间运动控制,提供逆向运动学解算和路径优化功能。可应用于搬运、焊接、装配等场景,实现高灵活性、高可靠性的机器人自动化解决方案。
● 多种运动控制库
内置丰富的运动控制功能库(如插补、位置控制、速度规划等),大幅减 少开发周期。用户可直接调用预置算法,快速实现点到点运动、连续轨迹 控制等复杂功能,提升系统响应精度与稳定性。
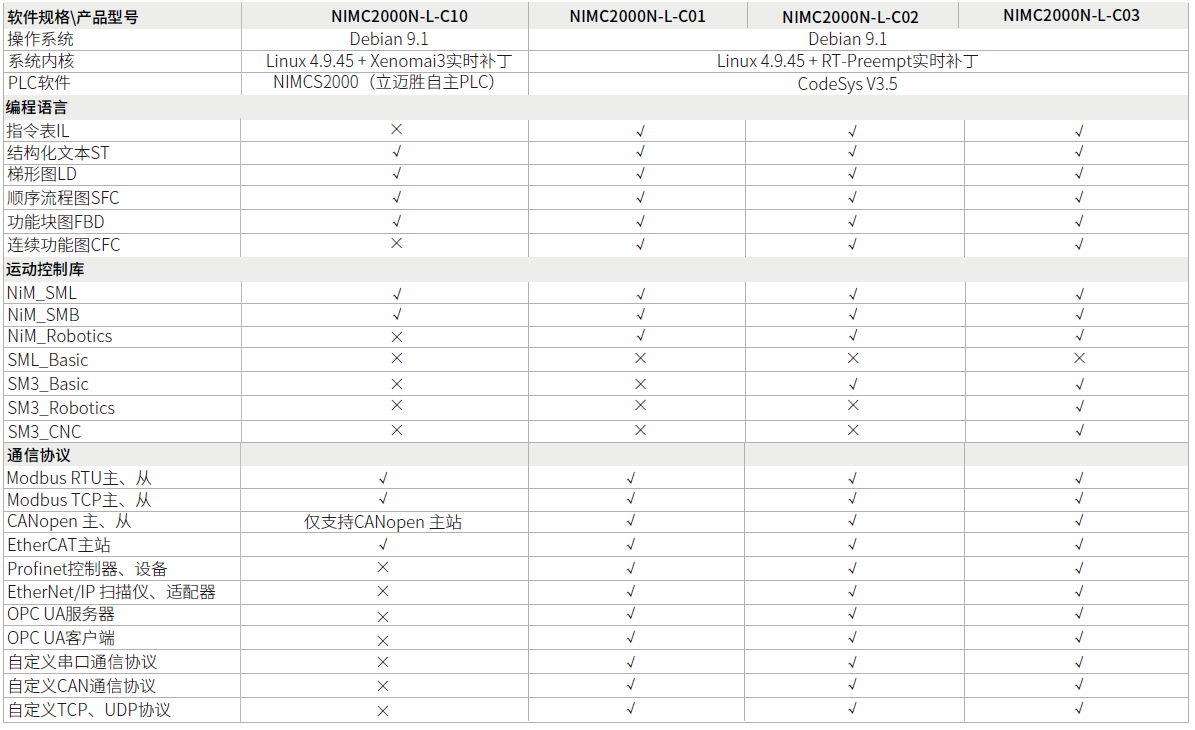
● 软件规格
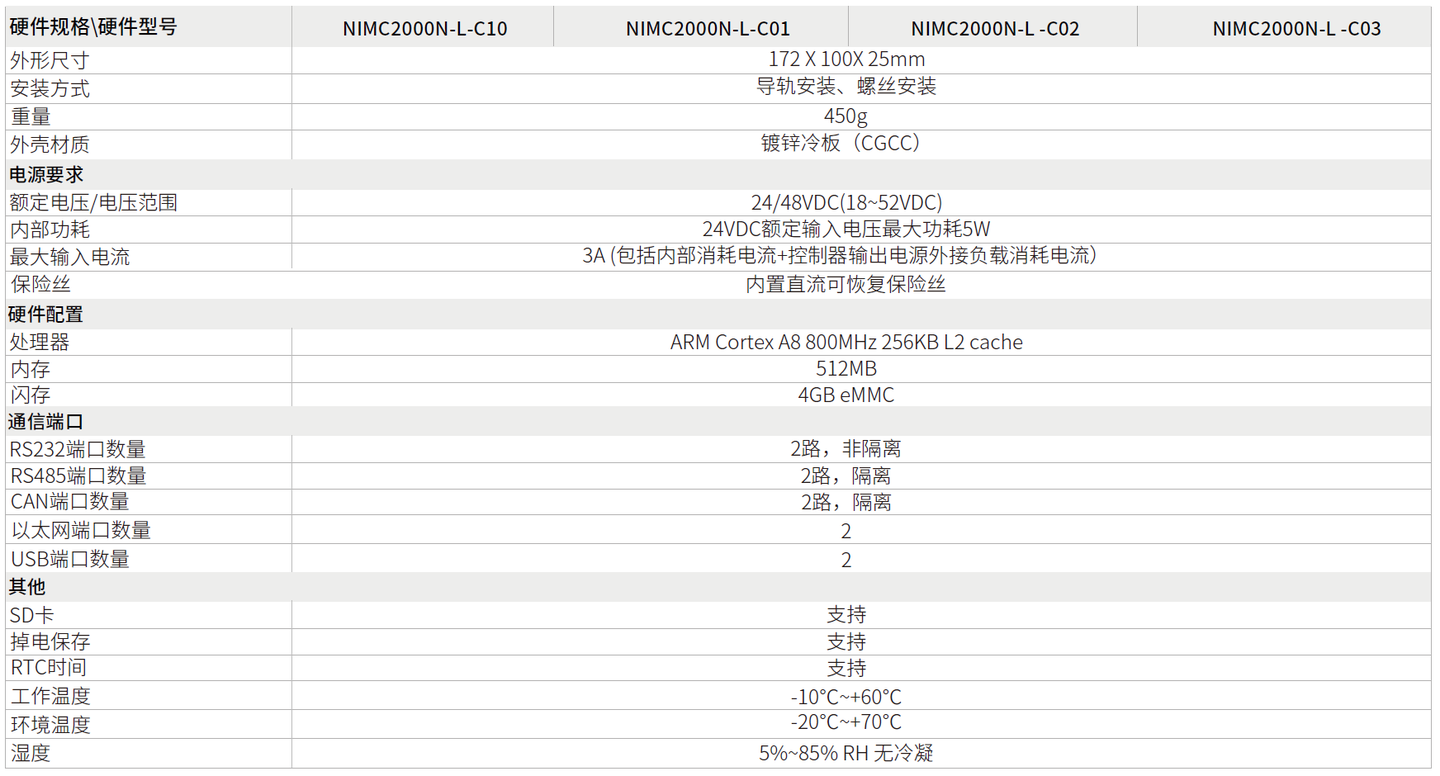
● 硬件规格

















 9253
9253

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









