




目录

一、CAN协议
- 采用 CAN2.0A 标准帧通信协议,
- 默认波特率1M。可设置:1Mbps、800kbps、500kbps、250kbps、125kbps、100kbps、50kbps、20kbps 、10kbps。
- ID设置:1-127
- 帧长度:0-8字节
- 匹配终端电阻120Ω(可选择是否接入)
俱瓷科技
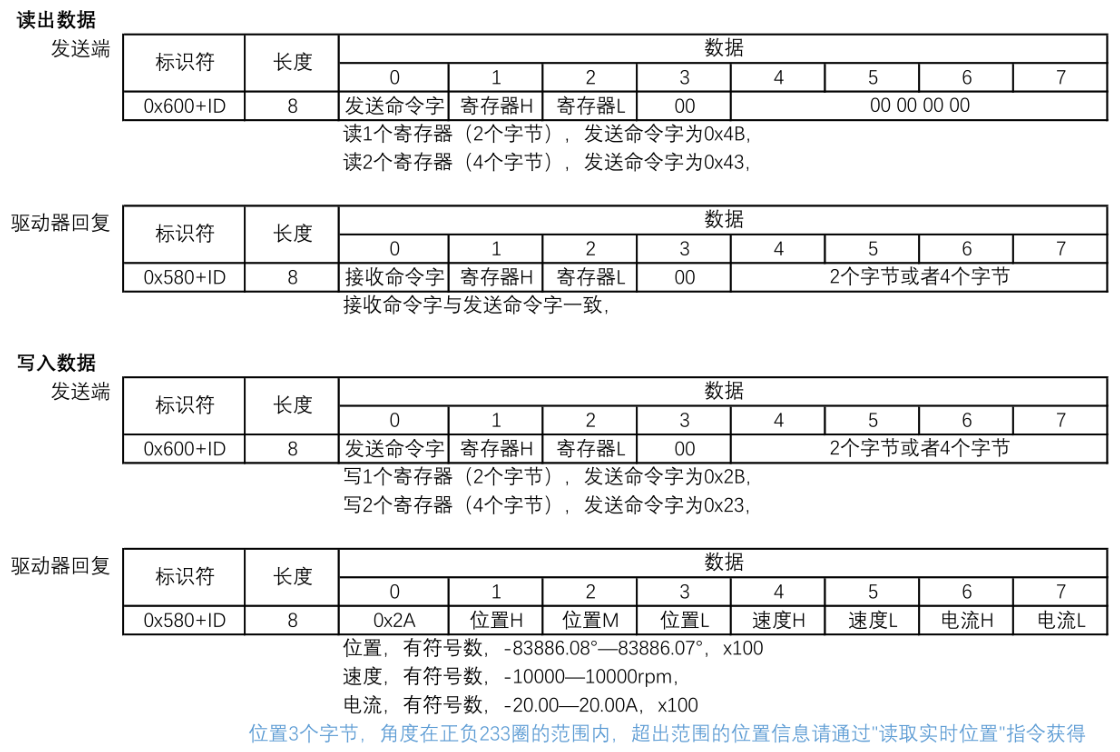
二、指令格式
三、通信接线
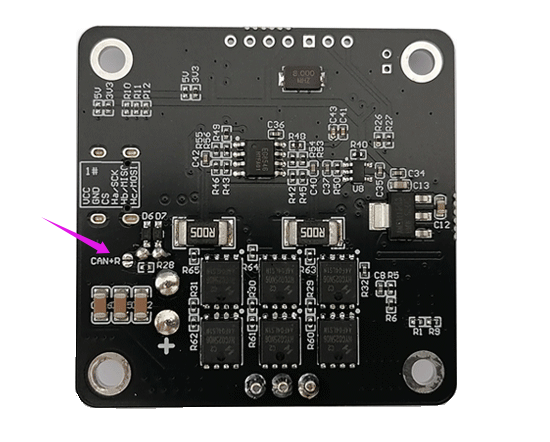
3.1、一对一通信

驱动器需要接入120Ω电阻,提高通信质量。
板载有120Ω电阻,短接驱动板背面的“CAN+R“接入点即可,下图:
3.2、组网通信
在总线两端分别接入120Ω电阻。

四、寄存器定义

①、错误信息

⑥、控制模式

五、指令说明
以下说明,假设驱动器的ID=1,
5.1、读取电源电压
上位机发送:标准帧ID:0x601 长度8 数据:4B 00 04 00 00 00 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:4B 00 04 00 00 7B 00 00

0x7B=123,放大了10倍,电源电压为12.3 V
5.2、读取母线电流
上位机发送:标准帧ID:0x601 长度8 数据:4B 00 05 00 00 00 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:4B 00 05 00 00 64 00 00

0x64=100,放大了100倍,母线电流为1 A
5.3、读取实时速度
上位机发送:标准帧ID:0x601 长度8 数据:43 00 06 00 00 00 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:43 00 06 00 00 00 C3 50

0x0000C350=50000,放大了100倍,当前速度为500 rpm
假如回复:43 00 06 00 FF FF 3C 99

0xFFFF3C99=-50023,当前速度为-500.23 rpm
5.4、读取实时位置
上位机发送:标准帧ID:0x601 长度8 数据:43 00 08 00 00 00 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:43 00 08 00 00 64 00 00

0x00008CA0=36000,放大了100倍,当前位置为360°
假如回复:43 00 08 00 FF FF B9 83

0xFFFFB983=-18045,放大了100倍,当前位置为-180.45°
5.5、读取驱动器温度
上位机发送:标准帧ID:0x601 长度8 数据:4B 00 0A 00 00 00 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:4B 00 0A 00 01 59 00 00

0x0159=345,放大了10倍,温度为34.5°
5.6、读取电机温度
上位机发送:标准帧ID:0x601 长度8 数据:4B 00 0B 00 00 00 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:4B 00 0B 00 02 37 00 00

0x0237=678,放大了10倍,母线电流为67.8°
5.7、读取错误信息
上位机发送:标准帧ID:0x601 长度8 数据:43 00 0C 00 00 00 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:43 00 0C 00 00 00 00 40

故障码=0x40,表示编码器SPI通信故障。更多故障码请看第四节寄存器说明。
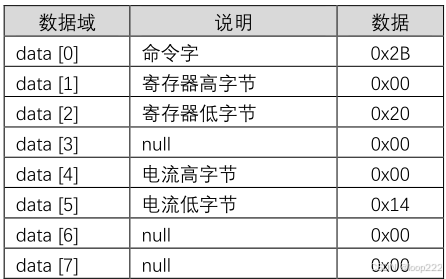
5.8、设定扭矩
设置扭矩为 0.2Nm,放大了 100 倍,20=0x0014,
上位机发送:标准帧 ID:0x601 长度 8 数据:2B 00 20 00 00 14 00 00
驱动器回复:标准帧 ID:0x581 长度 8 数据:2A 01 E2 40 01 59 00 4E
5.9、设置速度
设置速度为500 rpm,放大100倍,50000=0xC350,
上位机发送:标准帧ID:0x601 长度8 数据:23 00 21 00 00 00 C3 50

驱动器回复:标准帧ID:0x581 长度8 数据:2A 01 E2 40 01 59 00 4E
设置速度为-500.23 rpm,放大100倍,-50023=0xFFFF3C99
上位机发送:标准帧ID:0x601 长度8 数据:23 00 21 00 FF FF 3C 99

5.10、设置绝对位置
设置绝对位置为360°,放大100倍,36000=0x8CA0,
上位机发送:标准帧ID:0x601 长度8 数据:23 00 23 00 00 00 8C A0

驱动器回复:标准帧ID:0x581 长度8 数据:2A 01 E2 40 01 59 00 4E
设置绝对位置为-180.45°,放大100倍,18045=0xFFFFB983
上位机发送:标准帧ID:0x601 长度8 数据:23 00 23 00 FF FF B9 83

5.11、设置相对位置
设置相对位置为360°,放大100倍,36000=0x8CA0,
上位机发送:标准帧ID:0x601 长度8 数据:23 00 25 00 00 00 8C A0

驱动器回复:标准帧ID:0x581 长度8 数据:2A 01 E2 40 01 59 00 4E
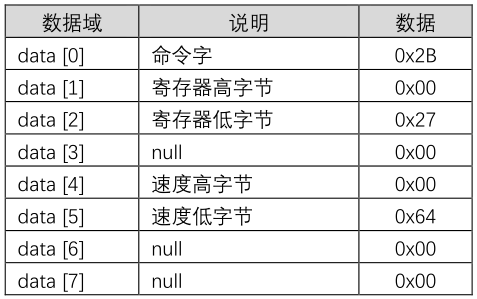
5.12、设置低速
设置速度为1rpm,放大100倍,100=0x64,
上位机发送:标准帧ID:0x601 长度8 数据:2B 00 27 00 00 64 00 00
驱动器回复:标准帧ID:0x581 长度8 数据:2A 01 E2 40 01 59 00 4E
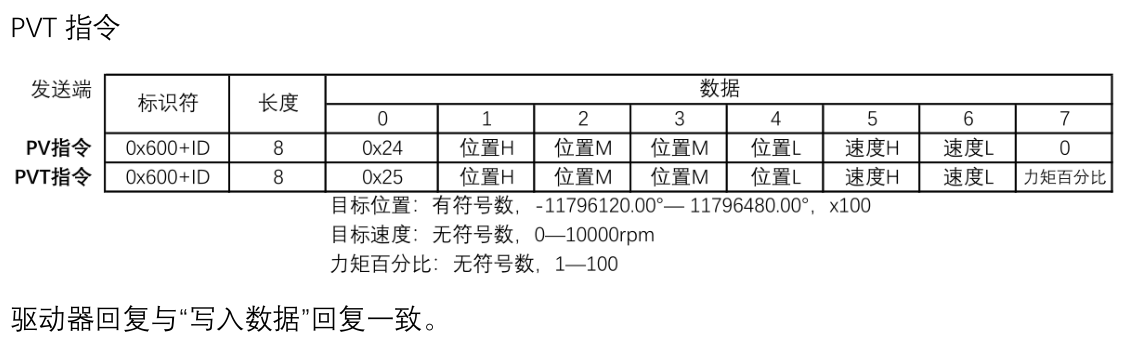
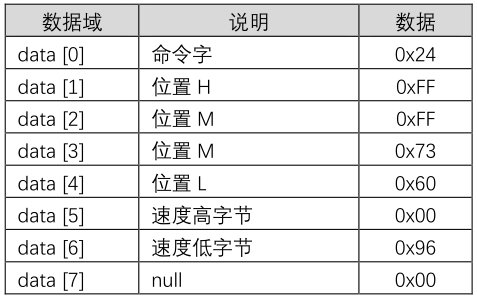
5.13、、 PV 指令
以速度 150rpm 转到-360°,
上位机发送:标准帧 ID:0x601 长度 8 数据:24 FF FF 73 60 00 96 00
驱动器回复:标准帧 ID:0x581 长度 8 数据:2A 01 E2 40 01 59 00 4E
5.14、PVT指令
速度 60rpm 力矩 80%转到 360°,
上位机发送:标准帧 ID:0x601 长度 8 数据:25 00 00 8C A0 00 3C 50

驱动器回复:标准帧 ID:0x581 长度 8 数据:2A 01 E2 40 01 59 00 4E
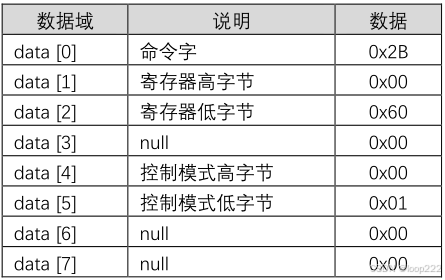
5.15、切换控制模式
假如当前为位置模式,切换为速度模式,
上位机发送:标准帧 ID:0x601 长度 8 数据:2B 00 60 00 00 01 00 00
驱动器回复:标准帧 ID:0x581 长度 8 数据:2A 01 E2 40 01 59 00 4E
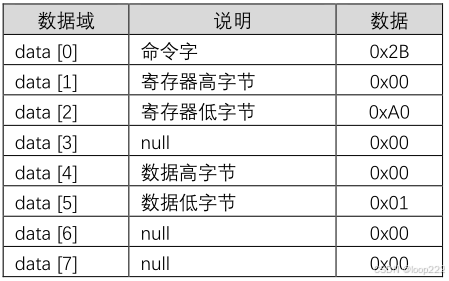
5.16、空闲状态
上位机发送:标准帧 ID:0x601 长度 8 数据:2B 00 A0 00 00 01 00 00
驱动器回复:标准帧 ID:0x581 长度 8 数据:2A 01 E2 40 01 59 00 4E
5.17、进入闭环
上位机发送:标准帧 ID:0x601 长度 8 数据:2B 00 A2 00 00 01 00 00
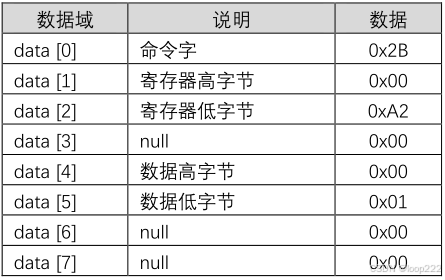
驱动器回复:标准帧 ID:0x581 长度 8 数据:2A 01 E2 40 01 59 00 4E
5.18、重启
上位机发送:标准帧 ID:0x601 长度 8 数据:2B 00 A5 00 00 01 00 00
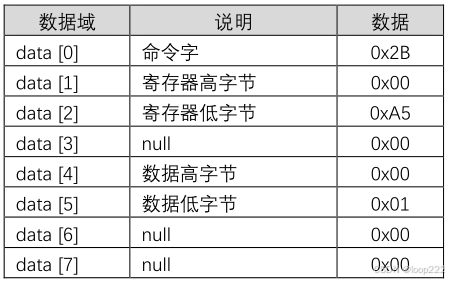
驱动器回复:标准帧 ID:0x581 长度 8 数据:2A 01 E2 40 01 59 00 4E
六、Canable操作示例
假如电机上电已经校准并保存了校准参数,通过 Canable 逐条发送指令:

- 1、读取电压:帧 ID: 0x601,长度 8 数据:4B 00 04 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:4B 00 04 00 00 78 00 00 (12.0V) - 2、进入闭环:帧 ID: 0x601,长度 8 数据:2B 00 A2 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2A 00 5C DD 00 00 00 00 - 3、绝对位置 0°:帧 ID: 0x601,长度 8 数据:23 00 23 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:2A 00 5C DD 00 00 00 00 - 4、绝对位置 360°:帧 ID: 0x601,长度 8 数据:23 00 23 00 00 00 8C A0
回复:帧 ID: 0x581,长度 8 数据:2A 00 00 00 00 00 00 00 - 5、PVT 指令,速度 150rpm 力矩 60%转到-360°,数据:25 FF FF 73 60 00 96 3C
回复:帧 ID: 0x581,长度 8 数据:2A 00 8C A1 00 00 00 00 - 6、PVT 指令,速度 60rpm 力矩 80%转到 0°,数据:25 00 00 00 00 00 3C 50
回复:帧 ID: 0x581,长度 8 数据:2A FF 73 5F 00 00 00 00 - 7、切换为速度模式:帧 ID: 0x601,长度 8 数据:2B 00 60 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2A 00 00 00 00 00 00 00 - 8、设置速度 500rpm:帧 ID: 0x601,长度 8 数据:23 00 21 00 00 00 C3 50
回复:帧 ID: 0x581,长度 8 数据:2A FF FF FD 00 00 00 00 - 9、设置速度 0rpm:帧 ID: 0x601,长度 8 数据:23 00 21 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:2A B9 07 AD 01 F4 00 00 - 10、切换为位置梯形轨迹:帧 ID: 0x601,长度 8 数据:2B 00 60 00 00 02 00 00
回复:帧 ID: 0x581,长度 8 数据:2A BA F6 7B 00 00 00 00 - 11、相对位置 360°:帧 ID: 0x601,长度 8 数据:23 00 25 00 00 00 8C A0
回复:帧 ID: 0x581,长度 8 数据:2A BA F6 7B 00 00 00 00 - 12、空闲模式:帧 ID: 0x601,长度 8 数据:2B 00 A0 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2A BB 83 1B 00 00 00 00 - 13、重启:帧 ID: 0x601,长度 8 数据:2B 00 A5 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2 A BB 82 DF 00 00 00 00
(完)
俱瓷科技

















 2277
2277

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









