




目录

一、电机参数
1.1、JC2804的参数


1.2、JC4010的参数


1.3、JC4310的参数

二、硬件接线


因市面上的USB转串口性能差异较大,有些对高波特率的支持不稳定,自2025年6月5号起,从本店购买的JC2804/JC4010/JC4310/JC4805,串口波特率默认为115200。
红色接电源正极,黑色接电源负极,电源电压 7—16V,黄色接 CAN_H,绿色接 CAN_L,
USB 转串口请使用 CH340(推荐)或 CP2102,
上电后蓝色指示灯一秒周期闪烁。
三、软件操作
JC2804 机电一体,使用串口调试参数,默认波特率 115200。
3.1、设置参数
驱动板中默认参数为适配当前电机的参数,连接设备,点击“读取参数”,下图:

连接设备,点击【读取参数】,默认参数为适配当前电机的参数。各个参数含义请看下面第六节《设置参数说明》。
3.2、零点校准
点击【校准电机】,右边显示“校准中…”,电机正反转一圈,大概 10 秒钟。
点击【读取参数】 (注意,校准结果不会自动更新) ,显示“校准成功”,点击【保存校准】。
如果拆装驱动板或更换了电机,需重新校准;

3.3、运行调试
3.3.1、设置原点
把电机转到指定位置,点击【设置原点】,当前绝对角度为 0,同时重启。
3.3.2、闭环控制
点击“闭环模式”,电机进入闭环状态,锁定在当前位置,
点击“打开实时”,显示实时数据,同时显示速度曲线,
电机默认配置为位置梯形轨迹,发送绝对位置,电机转到指定角度。

位置梯形轨迹模式下,电机除了“绝对位置指令”,还支持“PVT 指令”和“相对位置指令”,指令详情请看《JC 系列串口通信协议》。
3.4、调整PI参数
-
如需调整 PI 参数,必须在电机静止状态下,【发送到 RAM】。PI 参数为经验值,可多次尝试找到最佳值,待参数确定后点击【保存】。

-
一般负载小的时候用默认参数,负载大的时候需调大 PI 参数。
-
位置 Kp 默认值不要修改,只修改速度 Kp 和 Ki。
-
调试时先把速度 Ki 设置为 0,只调速度 Kp,待基本稳定后再逐渐增加 Ki。
-
PI 参数调稳定后再考虑是否添加转动惯量。
3.5、切换控制模式
例如现在是“位置梯形轨迹”,如需切换到“速度模式”,选择速度模式,点击“发送”,驱动器切换为速度模式。
设置相应的速度,点击“发送”,电机按照指定速度转动。
切换后的模式不能保存,重启后恢复为“位置梯形轨迹”。

3.6、故障码说明
电机运行过程中可能会出现各种故障,在实时显示中可以读出“错误标志“,故障标志为十六 进制显示,各 bit 代表的故障如下:

四、串口通信演示
电机参数请先通过上位机设置,此处仅列举常用指令:
4.1 、串口指令示例
- 1、读取电压:01 03 00 04 00 01 C5 CB
回复:01 03 02 00 78 B8 66(12.0V) - 2、校准电机:01 06 00 A1 00 01 19 E8
回复:01 06 00 A1 00 01 19 E8 - 3、读取校准结果:01 03 00 C2 00 01 25 F6
回复:01 03 02 00 01 79 84(校准成功) - 4、进入闭环:01 06 00 A2 00 01 E9 E8
回复:01 06 00 A2 00 01 E9 E8 - 5、绝对位置 0°:01 10 00 23 00 02 04 00 00 00 00 B1 A2
回复:01 10 00 23 00 02 B0 02 - 6、绝对位置 360°:01 10 00 23 00 02 04 00 00 8C A0 D5 1A(36000=360°)
回复:01 10 00 23 00 02 B0 02 - 7、PVT 指令,速度 150rpm 力矩 60%转到-360°:01 25 FF FF 73 60 00 96 3C AA 3D
回复:01 2A 00 00 8C A1 00 00 00 00 00 00 AB 26 - 8、PVT 指令,速度 60rpm 力矩 80%转到 0°:01 25 00 00 00 00 00 3C 50 D4 7B
回复:01 2A FF FF 73 63 00 00 00 00 00 00 77 E9 - 9、读取位置:01 03 00 08 00 02 45 C9
回复:01 03 04 00 00 00 00 FA 33 - 10、切换为速度模式:01 06 00 60 00 01 48 14
回复:01 06 00 60 00 01 48 14 - 11、设置速度 500rpm:01 10 00 21 00 02 04 00 00 C3 50 60 B7(0xC350=500rpm)
回复:01 10 00 21 00 02 11 C2 - 12、读取速度:01 03 00 06 00 02 24 0A
回复:01 03 04 00 00 C4 28 A8 ED(0xC428=502.16rpm) - 13、空闲模式:01 06 00 A0 00 01 48 28
回复:01 06 00 A0 00 01 48 28 - 14、重启:01 06 00 A5 00 01 58 29
回复:01 06 00 A5 00 01 58 29 - 15、擦除:01 06 00 A3 00 01 B8 28
回复:01 06 00 A3 00 01 B8 28
4.2 、其它
更多串口指令操作,请看《JC 系列串口通信说明》。
五、CAN模块操作
JC2804 的 CAN 通信为标准帧,波特率默认 1M(可通过 UART 接口修改)。
5.1、使用CANable
通过串口调参后,您可以使用任何一款 CAN 模块,通过逐条发送指令的方式控制驱动器,比如 CANable:

5.2、指令示例
标准帧,默认波特率 1M,
- 1、读取电压:帧 ID: 0x601,长度 8 数据:4B 00 04 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:4B 00 04 00 00 78 00 00 (12.0V) - 2、进入闭环:帧 ID: 0x601,长度 8 数据:2B 00 A2 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2A 00 5C DD 00 00 00 00 - 3、绝对位置 0°:帧 ID: 0x601,长度 8 数据:23 00 23 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:2A 00 5C DD 00 00 00 00 - 4、绝对位置 360°:帧 ID: 0x601,长度 8 数据:23 00 23 00 00 00 8C A0
回复:帧 ID: 0x581,长度 8 数据:2A 00 00 00 00 00 00 00 - 5、PVT 指令,速度 150rpm 力矩 60%转到-360°,数据:25 FF FF 73 60 00 96 3C
回复:帧 ID: 0x581,长度 8 数据:2A 00 8C A1 00 00 00 00 - 6、PVT 指令,速度 60rpm 力矩 80%转到 0°,数据:25 00 00 00 00 00 3C 50
回复:帧 ID: 0x581,长度 8 数据:2A FF 73 5F 00 00 00 00 - 7、切换为速度模式:帧 ID: 0x601,长度 8 数据:2B 00 60 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2A 00 00 00 00 00 00 00 - 8、设置速度 500rpm:帧 ID: 0x601,长度 8 数据:23 00 21 00 00 00 C3 50
回复:帧 ID: 0x581,长度 8 数据:2A FF FF FD 00 00 00 00 - 9、设置速度 0rpm:帧 ID: 0x601,长度 8 数据:23 00 21 00 00 00 00 00
回复:帧 ID: 0x581,长度 8 数据:2A B9 07 AD 01 F4 00 00 - 10、切换为位置梯形轨迹:帧 ID: 0x601,长度 8 数据:2B 00 60 00 00 02 00 00
回复:帧 ID: 0x581,长度 8 数据:2A BA F6 7B 00 00 00 00 - 11、相对位置 360°:帧 ID: 0x601,长度 8 数据:23 00 25 00 00 00 8C A0
回复:帧 ID: 0x581,长度 8 数据:2A BA F6 7B 00 00 00 00 - 12、空闲模式:帧 ID: 0x601,长度 8 数据:2B 00 A0 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2A BB 83 1B 00 00 00 00 - 13、重启:帧 ID: 0x601,长度 8 数据:2B 00 A5 00 00 01 00 00
回复:帧 ID: 0x581,长度 8 数据:2A BB 82 DF 00 00 00 00

5.3、其它
更多CAN指令操作,请看《JC系列CAN通信说明》。
六、配置参数说明

设备连接
点击“刷新”,选择对应的COM,点击“连接设备”,软件左下角会提示“连接成功”。驱动板出厂默认ID为1,波特率保持默认即可。下图:

基本设置

- 设置ID:如需CAN组网,可以设置不同的ID号,设置范围1-127;串口通信不区分ID,
- 串口波特率:9600、38400、57600、115200(默认)、230400、460800、921600,
- CAN波特率:10k、20k、50k、100k、125k、250k、500k、800k、1M(默认),
电机设置

- 电机类型:电机的相电阻小于2Ω的为“High Current”,大于2Ω的为 “Gimbal”,实际应用中大于1Ω的都设置为“Gimbal”。
- 极对数:电机磁极对数叫极对数,注意区分“极数”和“极对数”两个概念,
- 校准电流:电机校准时的电流,对于High Current电机,就是电流的采样值;对于Gimbal电机,会把校准电流等比例为占空比,比如电源电压12V,校准电流为3,那么校准时的pwm占空比固定为25%。实际操作中,根据经验设置校准电流,如果设置的太小,电机没劲,校准时转不动,校准容易出错;如果校准电流设置的太大,电机发热,可能损坏电机和板载MOS。
- 编码器类型:目前支持Hall/ABZ/AS5047P/MT6701/MA730/TLE5012B/MT6835 /Sensorless,根据实际应用选择。
- 编码器cpr:SPI接口的磁编码器已经固定了cpr无需设置;ABZ信号的cpr根据实际设置;霍尔电机的cpr=极对数x6;无感电机不需要设置cpr,不用管即可。
- 编码器带宽:一般使用默认值1000即可,霍尔电机cpr较低,需要设置小一点,比如轮毂电机设置为100,常用的2对极霍尔电机设置为50—60。
- 校准最大电压:电机校准时用于测量相电感,一般使用默认值2,对于电感比较大的电机,可以设置偏大一点,比如轮毂电机设置为5。
- 电机方向:设置反向,电机反转。
- 力矩常数:电机的力矩常数,用于力矩模式。如果不清楚电机参数,可使用默认值。
- SPI波特率:有些spi接口编码器,接线特殊,或电磁环境恶劣,需调整波特率,达到最佳读取效果,正常使用默认值。
- 输出限制:限制电机的堵转电流,降低功率减少电机发热。限制的是Id/Iq输出,所以此处电流值并不是母线电流。使用时请多次对比测试,找到适合自己电机的限制值。对这个参数不熟练的,也可以通过PVT指令中的扭矩百分比限制最大输出。
- KV值:只对无感电机Sensorless有效,其它类型电机不用管。
控制设置

-
控制模式:力矩、速度、位置梯形轨迹、位置平滑滤波、位置直通模式、低速大扭模式。
-
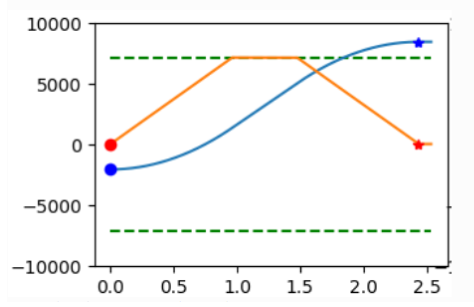
位置梯形轨迹:默认“最大速度”参数为梯形轨迹模式的最大速度,可通过PVT指令中的速度设置梯形轨迹的最大速度,“梯形轨迹加速度”控制电机速度上升斜率, “梯形轨迹减速度”控制电机速度下降斜率,如下图:
-
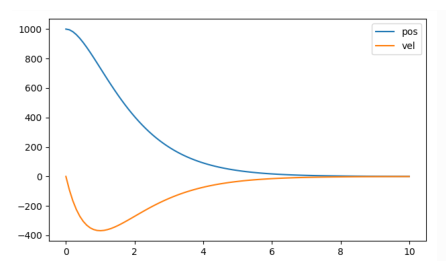
位置平滑模式:受“最大速度”、“滤波带宽”两个参数的约束,从下图曲线可以看出,电机快速启动,缓慢停止。调整“滤波带宽”实现不同的停止速度,如下图:
-
位置直通模式:直接把设置的目标位置传入运算,电机反应速度最快,但缺乏上升和下降缓冲,电机转动比较生硬。
-
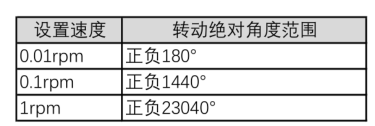
低速大扭模式:在速度模式下,如果设置速度过低,电机没劲转不动。低速大扭模式可以使电机在超低速时仍保持最大扭矩,速度低至0.01rpm,但受限于单浮点数精度,电机的转动范围受限,如下图:
-
-
最大速度:限制电机运行时的最大速度,对所有控制模式有效。最大速度不能设置的太小(比如100rpm),否则PID运算受限,电机反应变慢。
-
力矩爬升率:只对“力矩模式”有效,控制电机运行时力矩增加和减小时的斜率。
-
速度爬升率:只对“速度模式”有效,控制电机运行时速度增加和减小时的斜率。
-
滤波带宽:只对“位置平滑模式”有效,类似电机减速时的加速度,值越大电机停止的越快,但如果值太大停止速度过快,就失去了平滑的意义。默认值为4,一般设置2-10之间。
-
位置Kp:对所有位置模式有效,P参数是经验值,默认40,尽量不要修改。
-
速度Kp、Ki:对“速度模式”和所有位置模式有效,PI参数是经验值,请根据实际应用设置。
-
转动惯量:电机的转动惯量和阻尼系数比较相似,都可以用这个参数表达,实际应用中这个参数很难量化,所以调试电机时,可以像PI参数一样多次尝试,找到最佳值。
-
梯形轨迹加速斜率:限制梯形轨迹的上升斜率。
-
梯形轨迹减速斜率:限制梯形轨迹的下降斜率。
保护设置

- 驱动器温度保护、电机温度保护、欠压保护、过压保护、过流保护。
- 根据需要设置对应的保护,使能可以选择“可恢复”和“不可恢复”,“可恢复”的保护,恢复后电机失能,需要重新发送指令进入闭环状态。
保存并重启
- 参数设置好以后,点击【保存并重启】,驱动板保存当前参数并重启(参数生效),左下角提示“设置成功”。
注意,重启后,USB通信需先点击“断开连接“再”连接设备“,才能与驱动器再次通信。
读取参数
- 点击【读取参数】,从驱动器读取当前电机配置到上位机。

擦除参数并重启
点击【擦除参数并重启】,驱动器恢复为默认参数并重启。
可擦除一切保存的参数,包括校准电机的校准值,和设置原点的角度值。
注意,重启后,USB通信需先点击“断开连接“再”连接设备“,才能与驱动器再次通信。

设备重启
点击【设备重启】,驱动器重启。
注意,重启后,USB通信需先点击“断开连接“再”连接设备“,才能与驱动器再次通信。

七、固件升级
通过串口升级固件,升级前请认真核对驱动器型号和固件版本。为防止误操作,点击DownLoad】后需要输入密码:168。


(完)
俱瓷科技

















 1193
1193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









