




离轴三反光学系统
反射式光学系统具有无色差的特性,传统的同轴两反光学系统具有存在遮拦、视场小等问题,离轴三反系统有更多的优化变量,可以矫正全部的初级像差,可以实现无遮拦、大视场、大相对孔径、高成像质量、长焦距,但存在检测装备难。
分类
- 光阑离轴:光阑离轴的离轴三反系统有中间像面,其孔径光阑在主镜上,出瞳在焦面前,可以实现100%冷光效率
- 视场离轴:视场离轴的离轴三反系统,其孔径光阑在次镜上,主镜与三镜处于对称状态,库克式离轴三反光学系统,分为M型和交叉型
指标要求
- D:250mm
- f:1000mm
- 视场-2°-2°,9°-11°
- 可见光
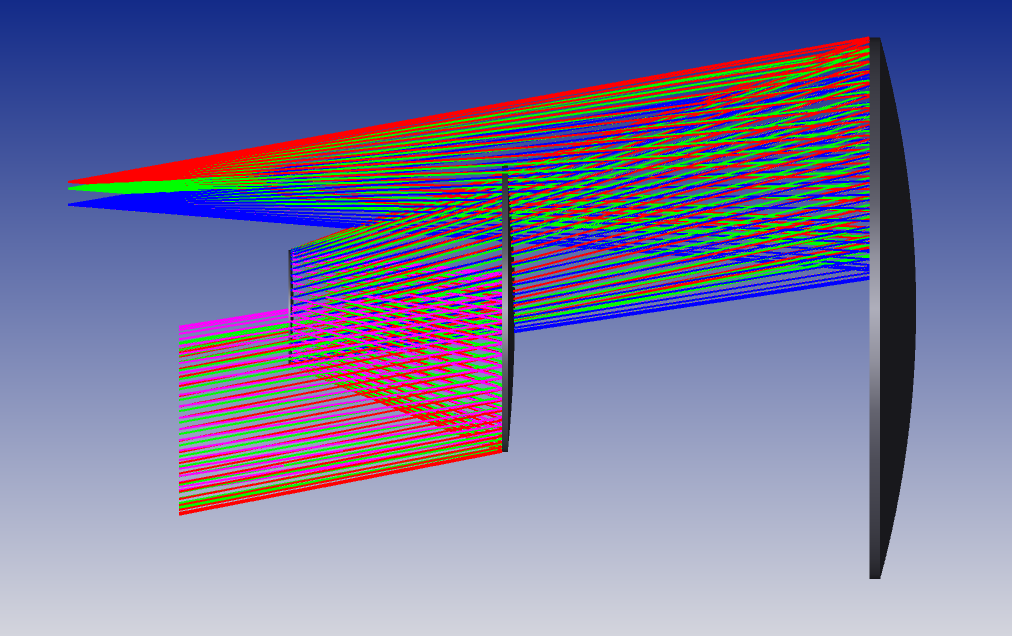
设计
使用ZEBASE库中的离轴三反结构O_015
进行缩放镜头:1.25,修改视场参数,可见光波段

去掉原初始孔径的预先设置值,并插入相应坐标间断面,使得后面对应的偏心和角度可以进行优化。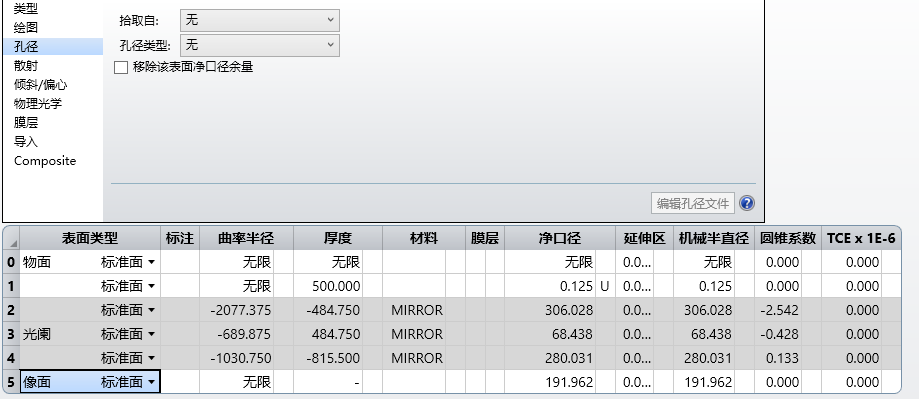
在每个反射面前加入坐标间断面并将像面改为倾斜面

如果一个反射镜将光线翻转180°,那么下一个面的位置应该在负Z方向,但如果没有坐标间断,厚度总是沿+Z方向测量,无法到达那里。
为什么需要两个坐标间断?
-
第一个坐标间断:将坐标系旋转,使反射镜的法线方向与新的Z轴一致
-
反射镜面:在旋转后的坐标系中,反射镜是“平面镜”或“球面镜”,沿新的Z轴放置
-
第二个坐标间断:将坐标系旋转回原方向(或转到下一个反射镜所需的方向)
优化
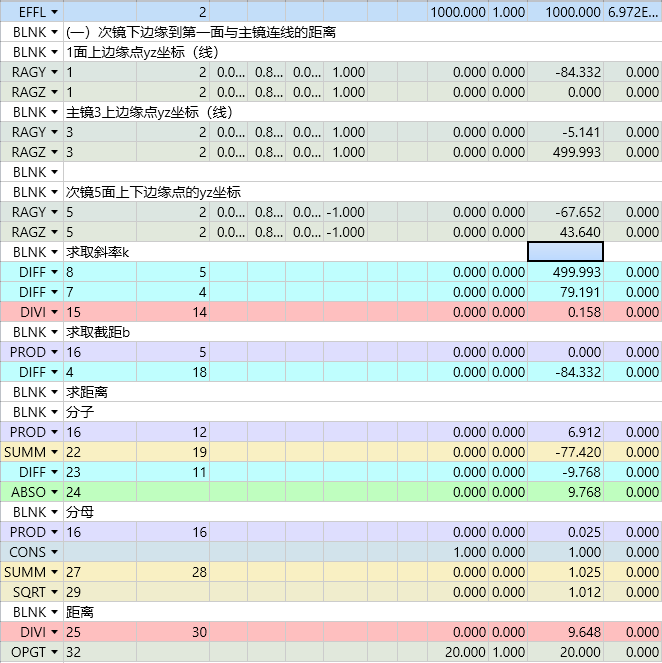
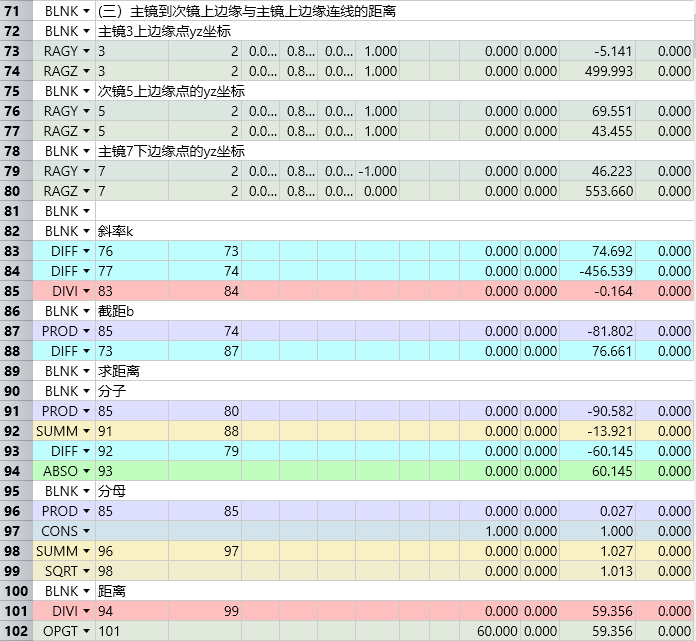
添加操作数
-
RAGY:追迹指定光线,获取其在面1上的Y坐标(归一化视场0.8,归一化孔径1.0,即上边缘点)。
-
结果:-95.217mm(说明有离轴)
-
-
RAGZ:获取同一光线在面1上的Z坐标。
-
结果:0.000mm(通常光轴方向为Z)
-
-
这些坐标用于后续的直线拟合。
计算直线斜率
-
DIFF 8-5:计算主镜与面1的 Z坐标差(ΔZ)。
-
DIFF 7-4:计算主镜与面1的 Y坐标差(ΔY)。
-
DIVI 15/14:计算斜率 k = ΔY/ΔZ ≈ -9.522×10⁻⁹(几乎为0,说明直线接近平行光轴)
计算截距
-
利用公式 b = Y₁ - k×Z₁,计算直线方程 Y = kZ + b 的截距b。
-
因为k≈0,b≈Y₁≈-95.217(但计算显示0.000,可能是当前迭代值)。
计算点到直线的距离
- 分子(操作数21-25):
-
计算 |k×Z₂ + b - Y₂|(次镜边缘点到直线的垂直Y方向偏差)
- 分母(操作数26-30):
-
计算 √(k² + 1)(直线斜率的归一化因子)
- 操作数32(DIVI 25/30):
-
最终得到距离 d = |k×Z₂ + b - Y₂| / √(k² + 1)
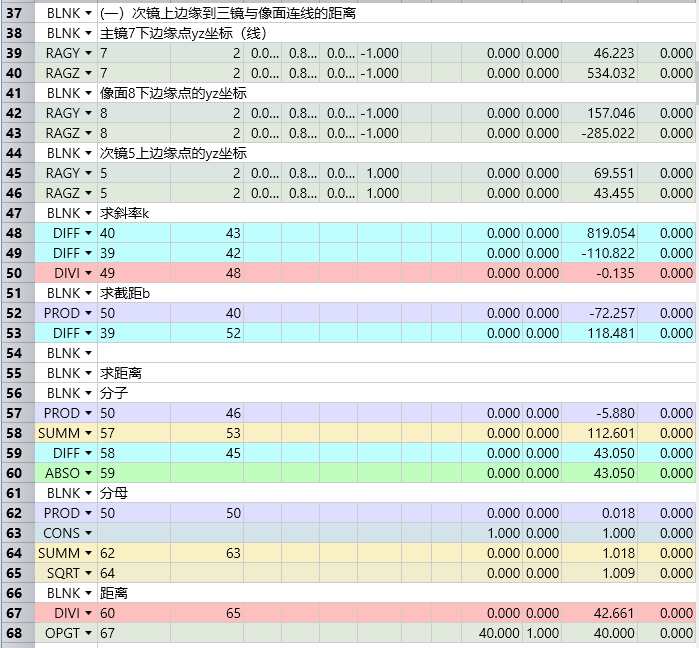
确保次镜下边缘与物面-主镜上边缘连线之间的距离大于20mm,这是为了避免遮拦(vignetting) 或保证机械间隙。
设置变量,进行优化
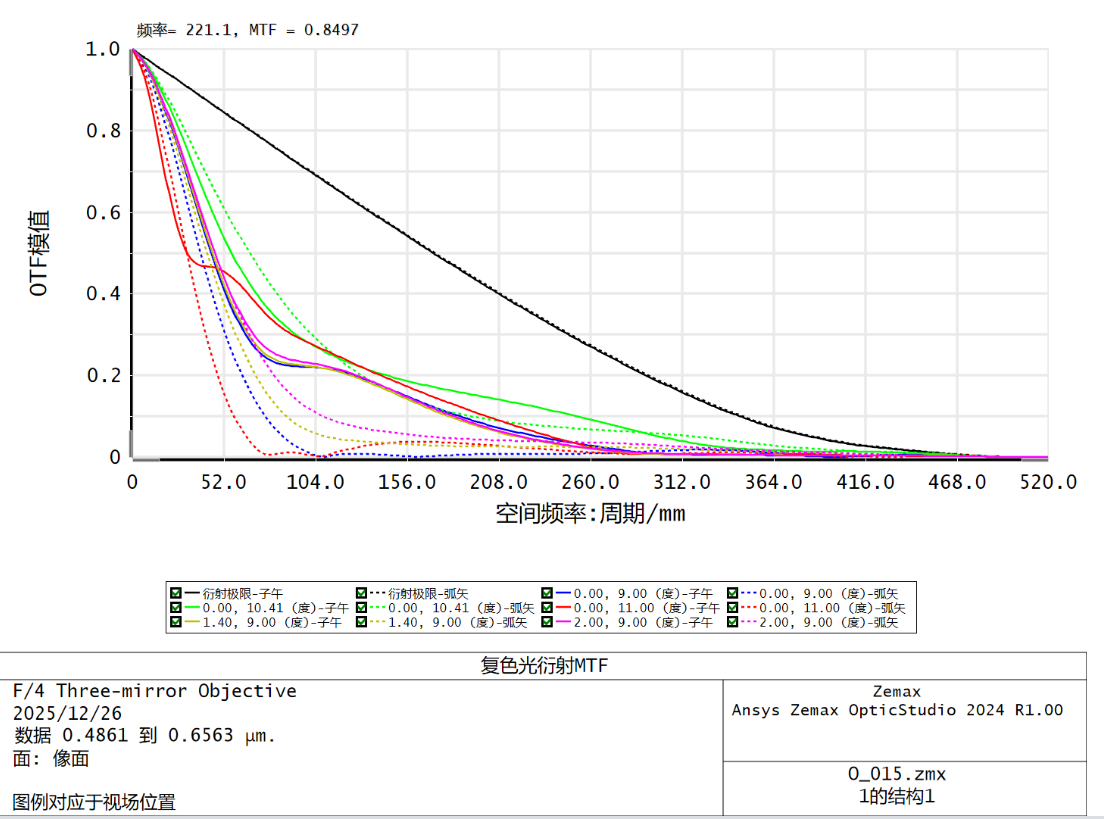
优化前
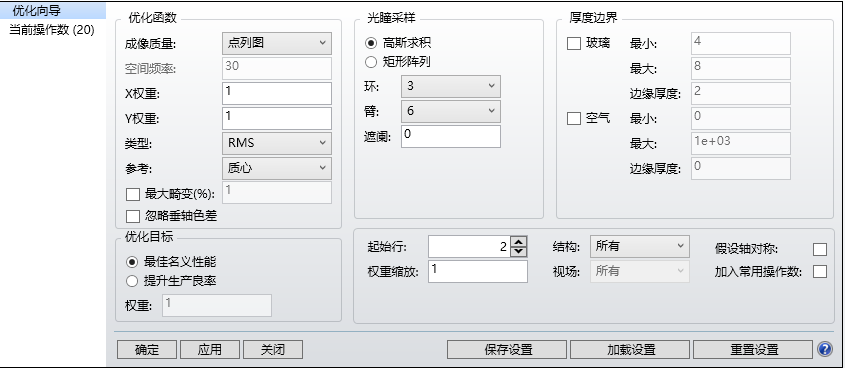
设置变量进行全局优化

优化结果
此时评价函数为0.004,评价函数小,优化效果不明显。
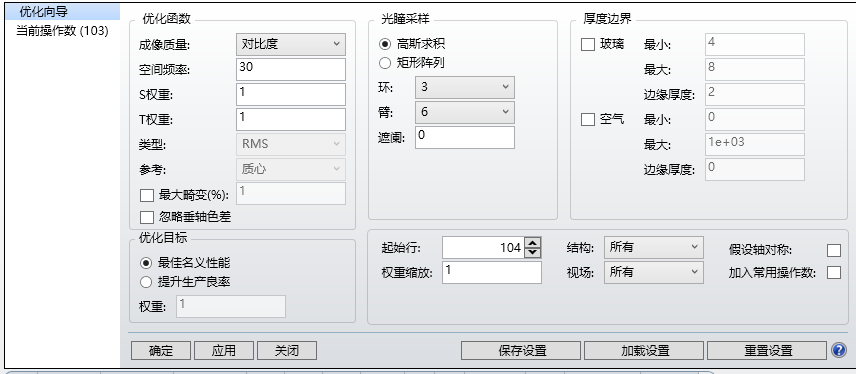
修改评价函数,改为对比度,进行优化,优化函数由0.1变为0.04
查看优化结构
效果得到了改善,但系统发生较大变换,不符合设计要求。
返回上一步的优化结果
添加镜间距控制操作数,主镜和次镜之间的距离,次镜和三镜之间的间距控制在150mm以内,上一布优化结果主镜和次镜之间的距离是500mm左右,主镜和三镜之间的距离900mm左右。

改为偶次非球面并将二次项和四次设置为变量进行优化

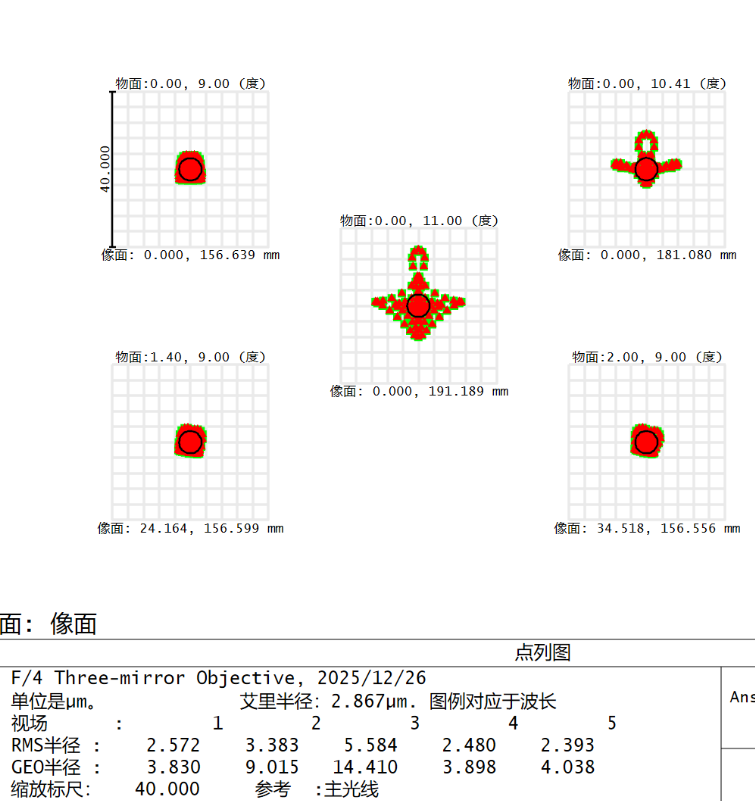
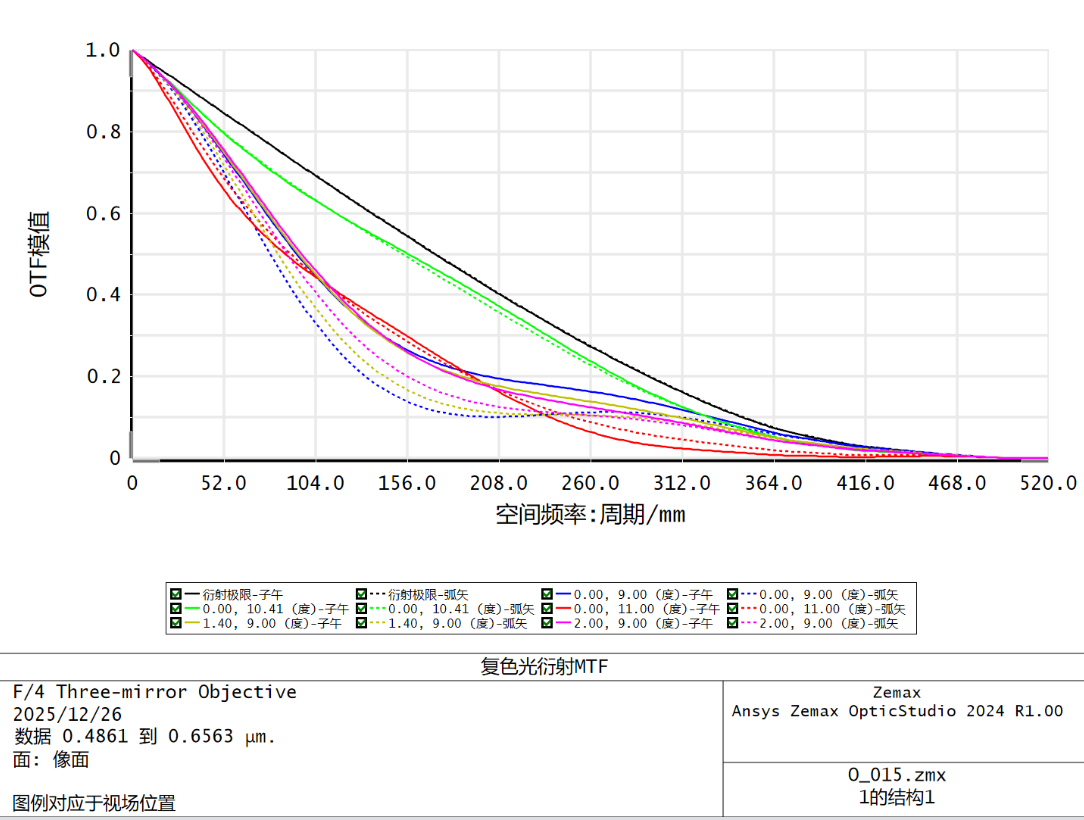
优化结果
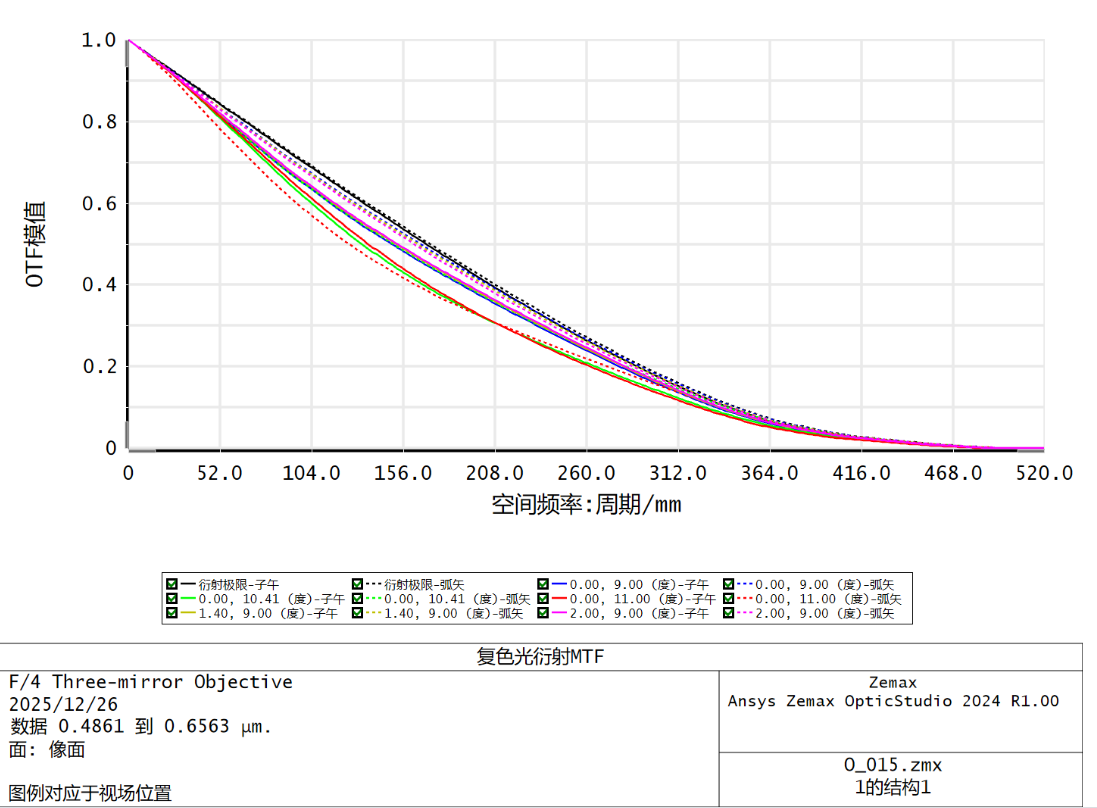
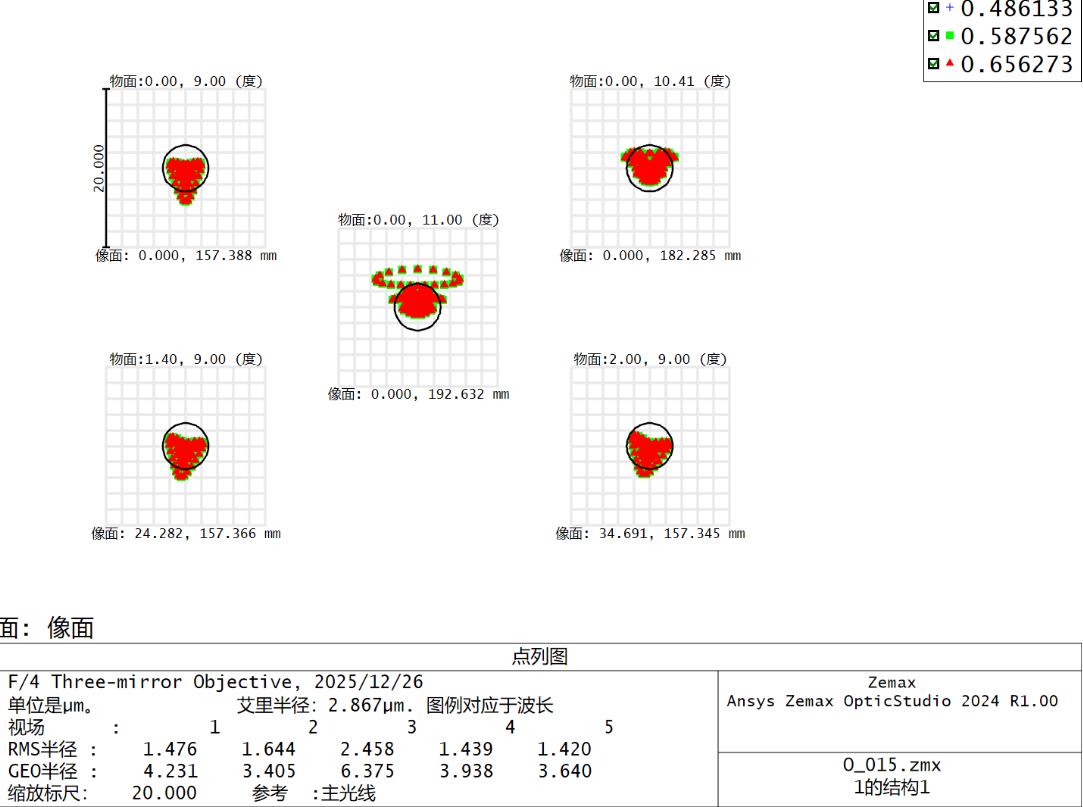
引入六次项变量
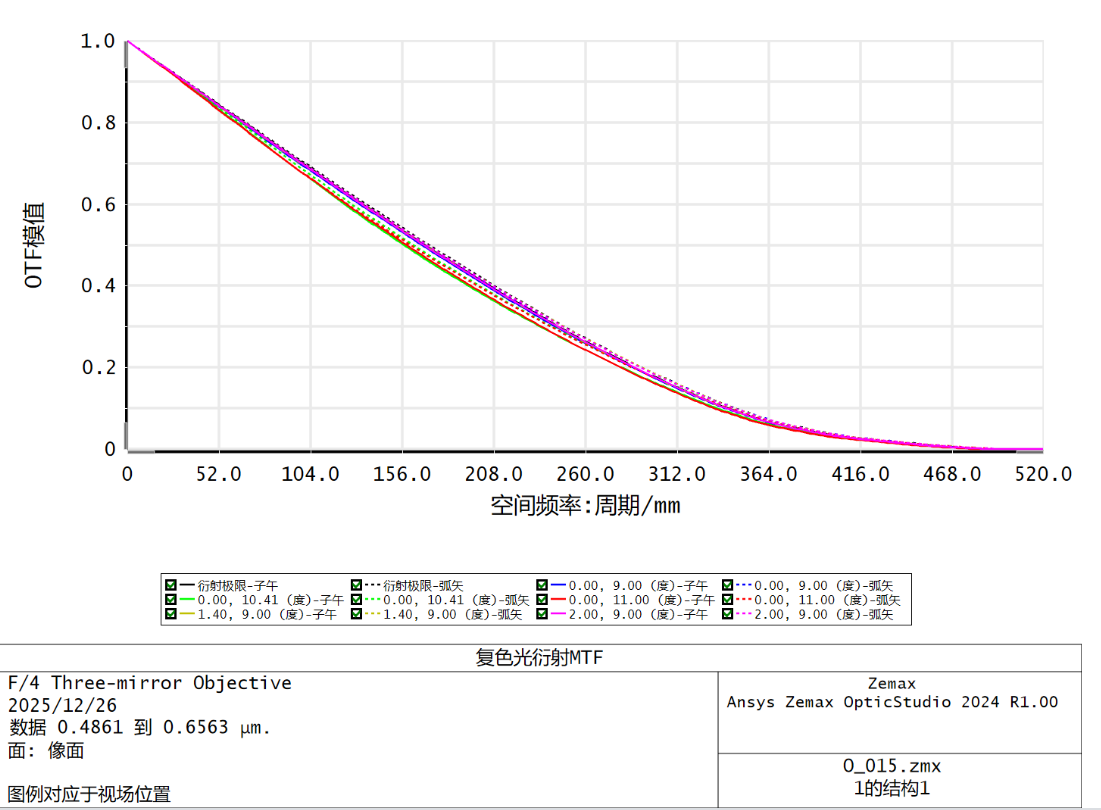
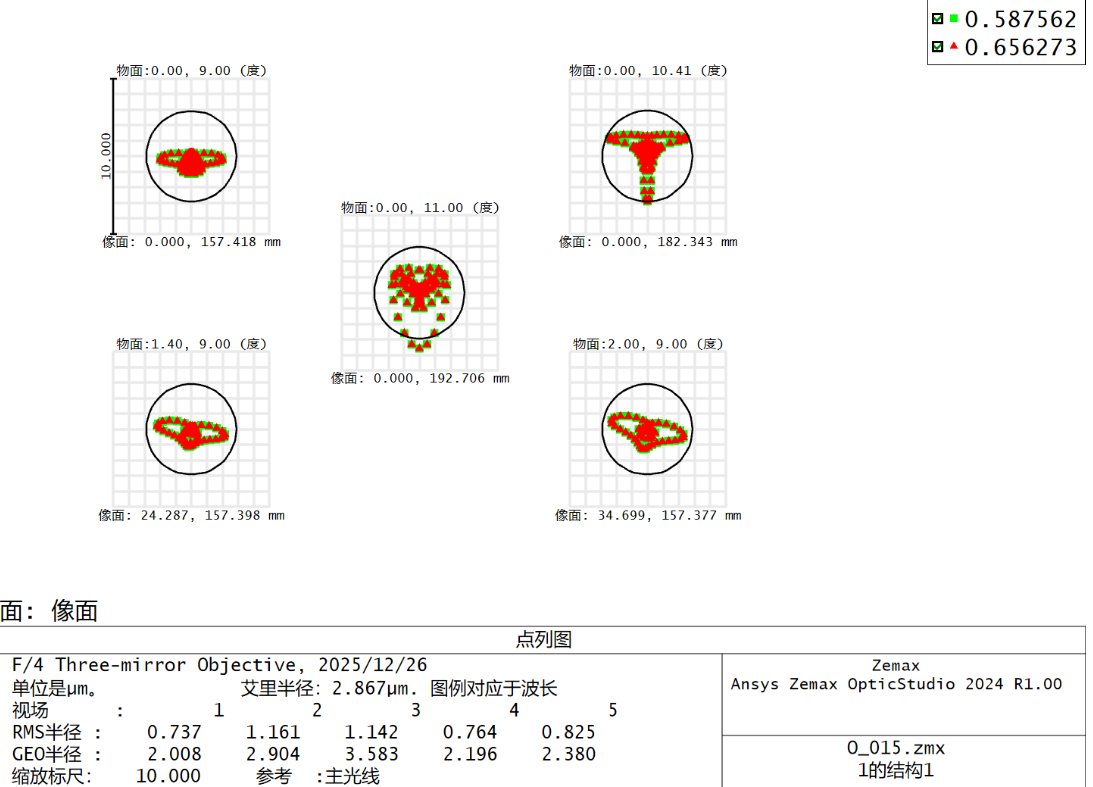
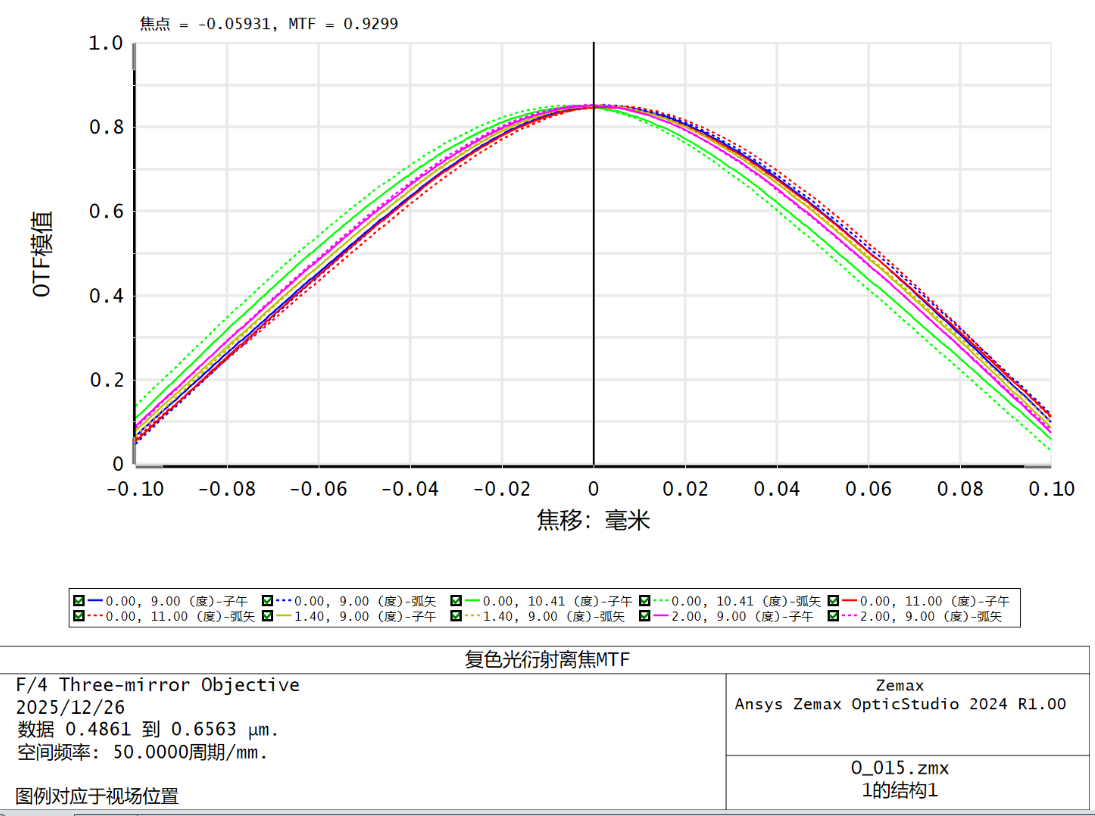
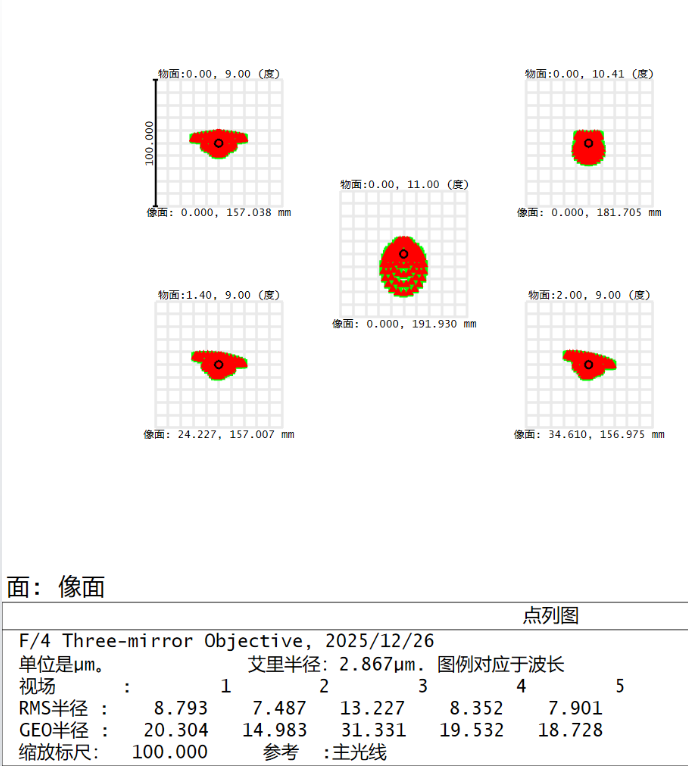
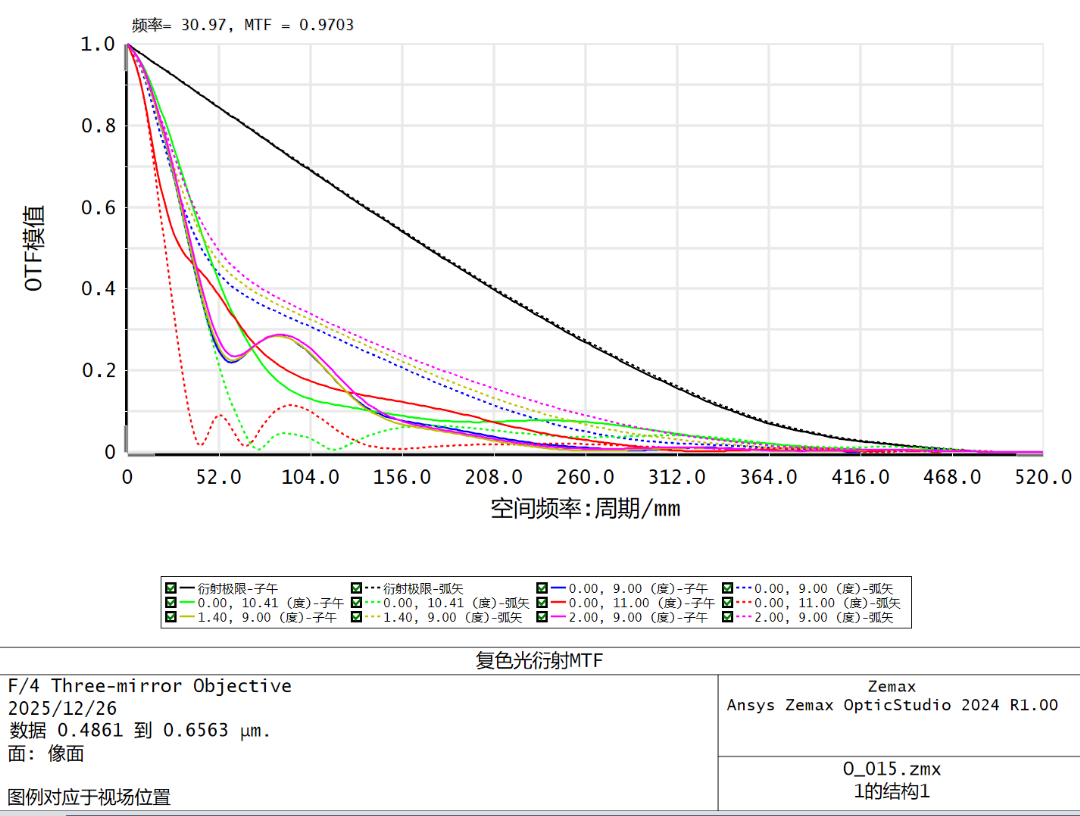
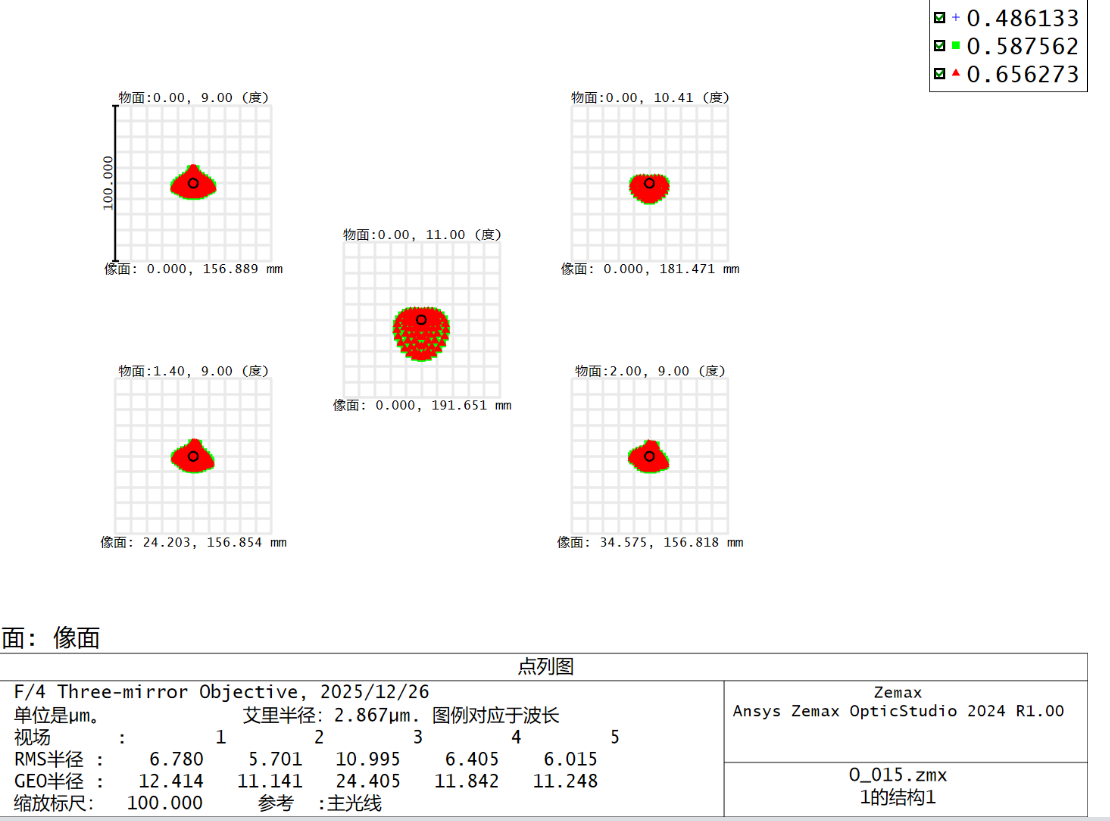
优化效果较好,传递函数和点列半径非常接近衍射极限,离焦曲线最高点统一。

















 683
683

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









