






 本文详细介绍了如何对lida2003-H743-5inch套机进行ArduPilot飞控的配置,包括APMv4.4.4固件安装、APM固件编译、WiFi电传设置以及光流计和雷达的整合,还涉及了基础配置和功能测试。
本文详细介绍了如何对lida2003-H743-5inch套机进行ArduPilot飞控的配置,包括APMv4.4.4固件安装、APM固件编译、WiFi电传设置以及光流计和雷达的整合,还涉及了基础配置和功能测试。
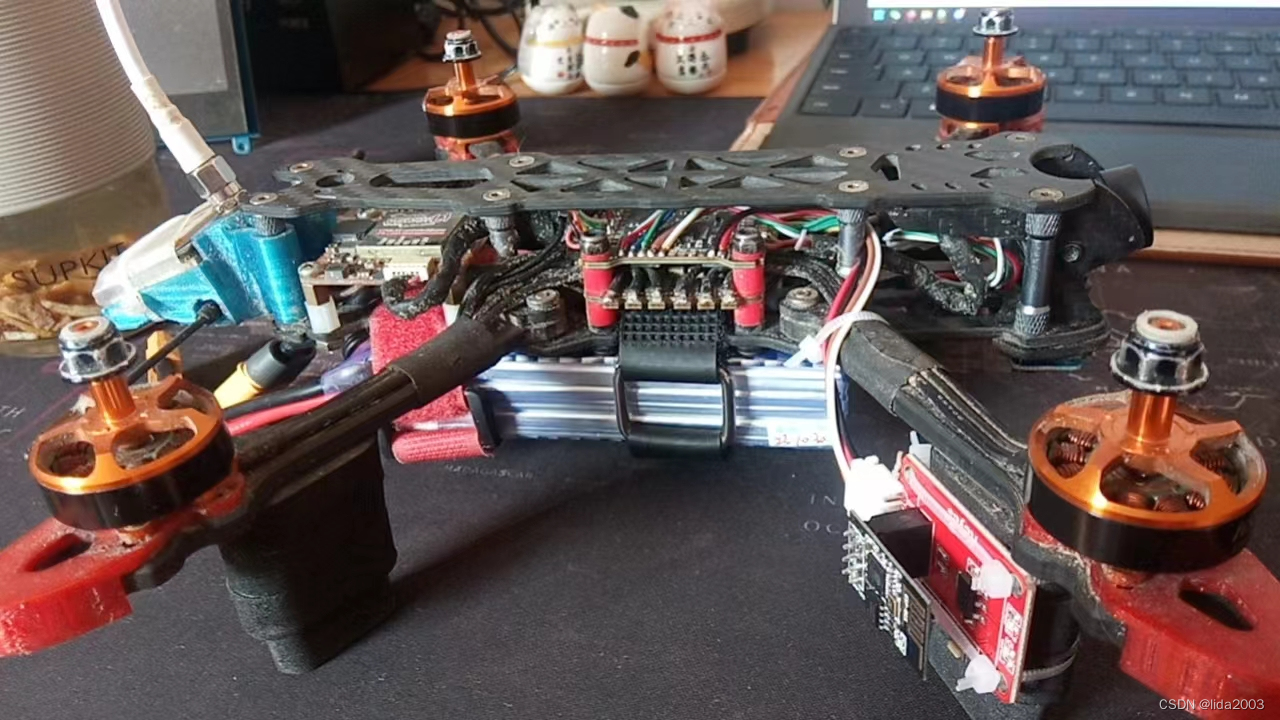
ArduPilot开源飞控之lida2003-H743-5inch套机配置
1. 源由
因为,之前进行相关代码配置和优化调整过程中,出现了不少的问题。上伴机电脑之前,再进行一次lida2003-H743-5inch套机配置整理。
2. 整理固件
2.1 APM v4.4.4固件
【1】官网将 从4.5.0开始支持H743 Dual BMI270,笔者固件v4.4.4
【2】Google Drive, Aocoda-RC-H743Dual-lida2003-4.4.4.zip
【3】优快云 Drive, Aocoda-RC-H743Dual-lida2003-4.4.4.zip
2.2 APM固件编译
【1】ArduPilot飞控AOCODARC-H7DUAL固件编译
【2】Copter-4.4-lida2003,解决tramp pandarc-vt5804ml1各段功率使用问题
【3】ArduPilot开源代码之AP_VideoTX
3. lida2003套机配置
3.1 基本配置
【1】ArduPilot之H743+BMI270x2+First Normal Takeoff
【2】ArduPilot开源飞控之磁力计校准
【3】ArduPilot开源代码之MatekSys Optical Flow 3901-L0X
3.2 wifi电传
SERIAL8_PROTOCOL = 2
SERIAL8_BAUD = 921
SERIAL8_OPTIONS = 0

3.3 光流计+雷达(MatekSys 3901-L0X)
参考:Optical Flow Sensor Testing and Setup
RC9_OPTION = 90 (EKF Pos Source) low is GPS, middle is OpticalFlow, high is unused
EK3_SRC_OPTIONS = 0 (Disable FuseAllVelocities)
EK3_SRC1_POSXY = 3 (GPS)
EK3_SRC1_POSZ = 1 (Baro)
EK3_SRC1_VELXY = 3 (GPS)
EK3_SRC1_VELZ = 3 (GPS)
EK3_SRC1_YAW = 1 (Compass)
EK3_SRC2_POSXY = 0 (None)
EK3_SRC2_VELXY = 5 (Optical Flow)
EK3_SRC2_POSZ = 2 (RangerFinder)
EK3_SRC2_VELZ = 0 (None)
EK3_SRC2_YAW = 1 (Compass)
FLOW_POS_X = 0.08 (m, set to 8 cm forward)
4. 测试
回头天气好点,去外面飞一圈!!!
Ardupilot 4.4.4 Mark4 + MatekSys Optical Flow 3901-L0X + FlowHold + Outside


















 8066
8066

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









