



【Carsim simulink联合仿真】根据文档复现递推最小二乘法估计轮胎侧偏刚度模型,文档详实,代码规范
刚接手Carsim和Simulink联合仿真项目时,看着文档里那套递推最小二乘法估计轮胎侧偏刚度的模型,心里直打鼓——这玩意儿真能在线估计参数?实际操作后发现,只要处理好数据同步和算法迭代,还真能在仿真过程中看着参数蹭蹭收敛。
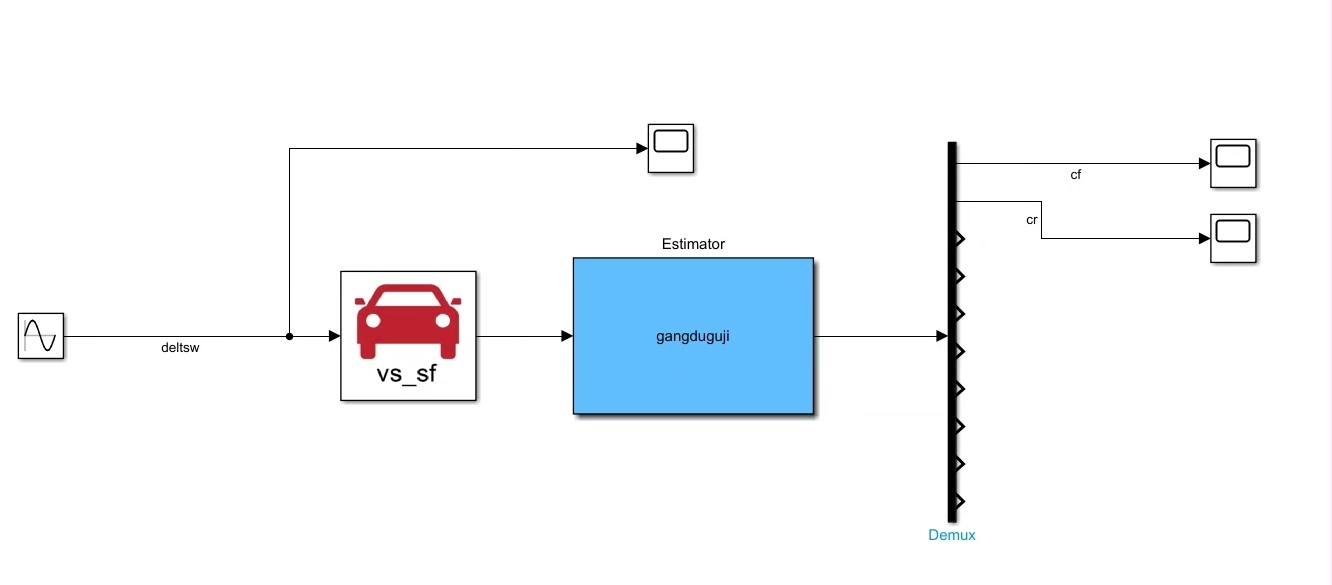
先说说模型搭建的坑。Carsim那头需要配置车辆动力学参数时,发现方向盘转角信号必须走Simulink输出通道,直接在Carsim里设置会丢失时间同步。解决办法是在Simulink里搞了个零阶保持器,硬核同步两边的采样时间:
function steering_angle = sync_signal(u)
persistent last_value;
if isempty(last_value)
last_value = 0;
end
if ~isnan(u)
last_value = u;
end
steering_angle = last_value;
end这段代码里的持久变量像极了打游戏时的存档点,确保Carsim突然抽风丢信号时,方向盘转角不会跳变到姥姥家。
核心算法部分,递推最小二乘法的实现比教科书上的公式刺激多了。在Simulink里用Matlab Function模块实现时,发现直接用矩阵运算会触发诡异的维度错误。后来改用递推形式的标量计算才稳住局面:
function [theta, P] = RLS(y, phi, theta_prev, P_prev)
K = P_prev * phi' / (1 + phi * P_prev * phi');
theta = theta_prev + K * (y - phi * theta_prev);
P = (eye(2) - K * phi) * P_prev;
% 防止协方差矩阵膨胀
P = 0.5*(P + P');
P = P + 0.01*eye(2)*(trace(P)<1e-6);
end这里两个骚操作很有意思:给协方差矩阵P加对称约束和小扰动,像极了给不安分的熊孩子系安全带。实测发现不加这两句的话,跑个二十秒仿真P矩阵就能膨胀到让Matlab怀疑人生。
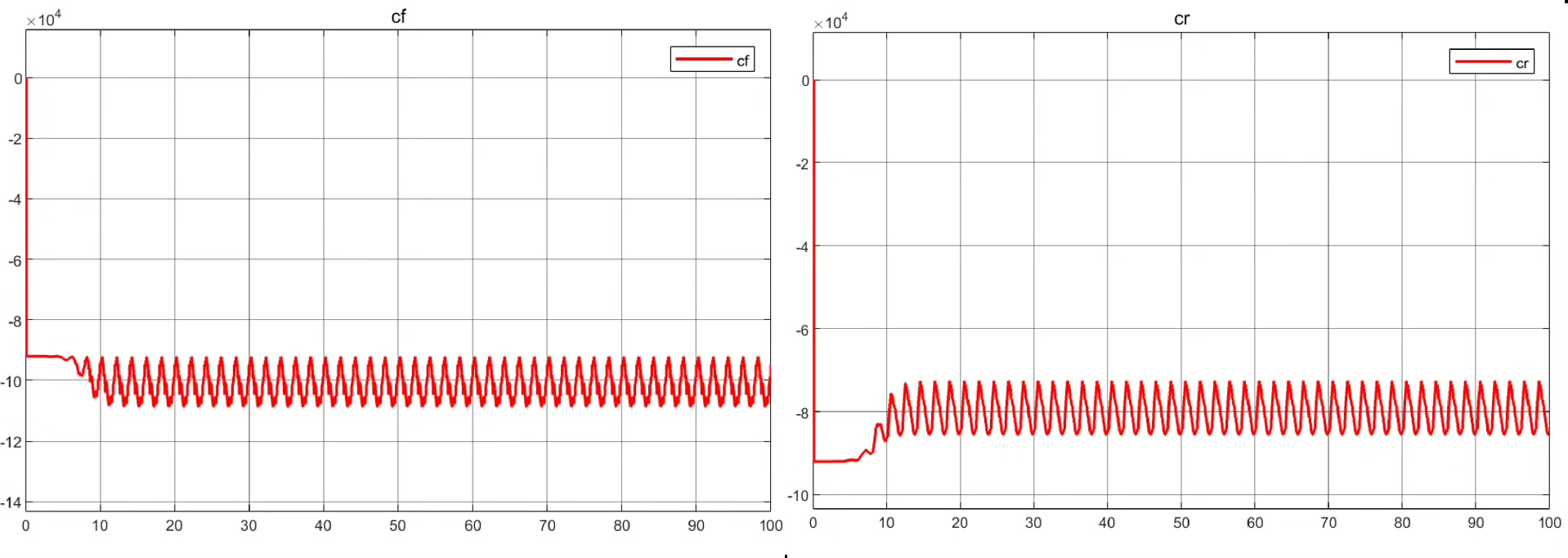
跑仿真时看着参数估计曲线跳舞,前五秒像醉汉画龙,十秒后突然开窍似的往理论值靠拢。特别是侧向速度估计值跟Carsim理论输出的对比图,两条曲线从互相嫌弃到如胶似漆,强迫症都被治愈了。
最后说个血泪教训:Carsim的传感器噪声模块别手贱全开,特别是横摆角速度噪声超过0.5deg/s后,参数估计立马开启蹦迪模式。后来自己撸了个移动平均滤波器才镇住场子,果然数据预处理才是算法的亲妈。

















 1430
1430

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









