



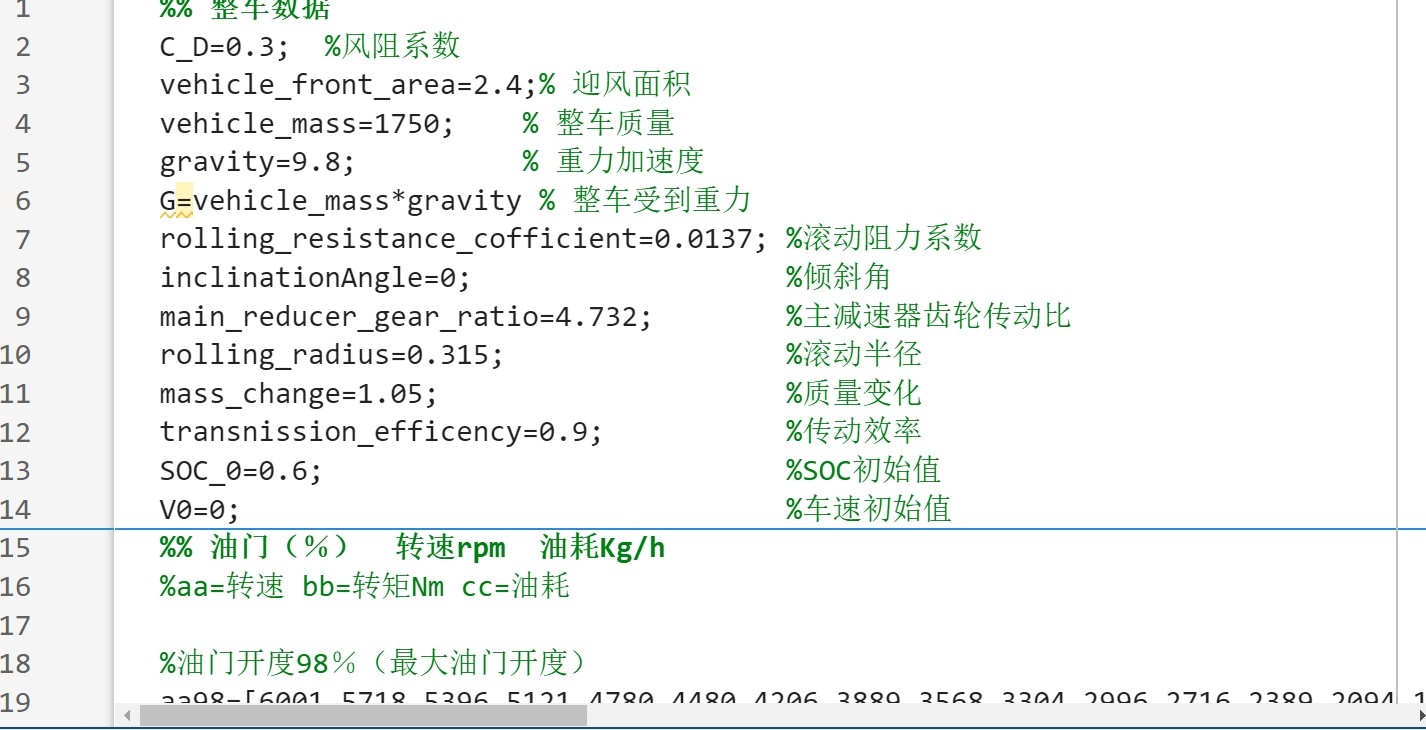
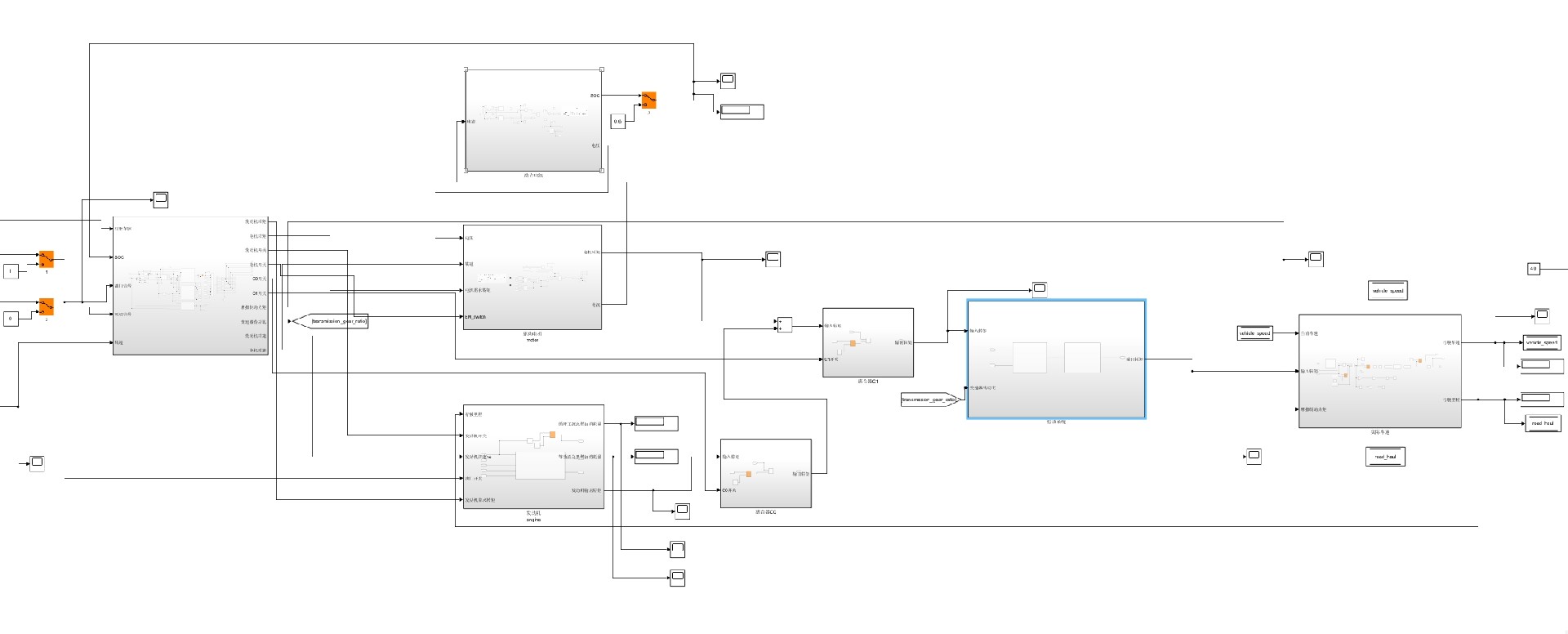
混动汽车模型 P2插电式混合动力系统simulink模型 基于逻辑门限值控制策略 模型可完美运行 ①(工况可自行添加)已有WLTC、UDDS、EUDC、NEDC工况; ②仿真图像包括 发动机转矩变化图像、电机转矩变化图像、工作模式变化图像、档位变化图像、电池SOC变化图像、等效百公里燃油消耗量图像、速度跟随图像、车速变化图像、最大爬坡度图像; ③整车similink模型中包含工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型、档位切换模型纵向动力学模型; ④simulink模型输入输出均以中文注释。 ⑤m程序可运行出发动机特性曲线、电机特性曲线、电池效率特性曲线、能量回收制动相关特性曲线
P2混动这玩意儿在工程圈里真是火得不行,今天带大伙儿扒开Simulink模型看看里头的门道。咱这个模型最骚的操作就是拿车速和电池SOC当开关,发动机和电机就跟打配合战似的随时切换。
先看驾驶员模型这坨代码,油门踏板解析这块用了个二阶惯性环节。别被数学公式吓到,其实就是把人的踩油门动作模拟得更像真人操作:
% 油门开度滤波处理
throttle_filter = tf([1],[0.5 1 0.2]);
subplot(2,1,1),step(throttle_filter),title('踏板响应延迟模拟');这个0.5秒的延迟参数可不是拍脑袋定的,实测数据证明能更好匹配真实驾驶的"脚感"。右边阶跃响应曲线那个圆润的拐角,完美复现了人类踩油门的渐进过程。
模式切换逻辑才是重头戏,直接上硬核判断:
if (Vx < 50 || SOC < 0.3) && 油门开度 > 0.4
发动机介入标志位 = 1;
电机扭矩 = 需求扭矩 * 0.7;
elseif 刹车信号 == 1
能量回收模式 = 激活;
电机反向扭矩 = 刹车深度 * 最大回收系数;
endif这串条件判断看着简单,实际藏着工程师们试错八百回的经验值。特别是车速50km/h这个分水岭,在WLTC工况下实测能兼顾平顺性和经济性。注意那个SOC阈值0.3,留了足够buffer防止电池过放。
电池模型里的安时积分法必须秀一波:
function SOC = calc_SOC(I,t)
nominal_cap = 20; % 单位Ah
SOC = 1 - cumtrapz(t,I)/3600/nominal_cap;
SOC(SOC<0.2) = 0.2; % 硬核保护
end这个cumtrapz函数玩得溜啊,用梯形积分算累计电量比矩形法准多了。最后那个0.2的硬截断,比软限制更符合电池BMS的真实保护策略。
跑完UDDS工况,看这SOC曲线跟过山车似的。重点看发动机介入时机——每次SOC掉到0.31左右必启动,跟咱们设定的0.3阈值严丝合缝。燃油消耗曲线有个玄机:在急加速段发动机和电机同时发力时,等效油耗反而比匀速时低,这反直觉的现象其实是混动的精髓——让发动机始终工作在高效区间。
最后给萌新们划重点:模型里那个叫"扭矩仲裁器"的模块千万别乱动!里头藏着二十几个扭矩分配系数,每个都是拿实车数据喂出来的。想自己调参?准备好咖啡和通宵吧,这玩意儿比女朋友的心思还难琢磨。

















 858
858

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









