



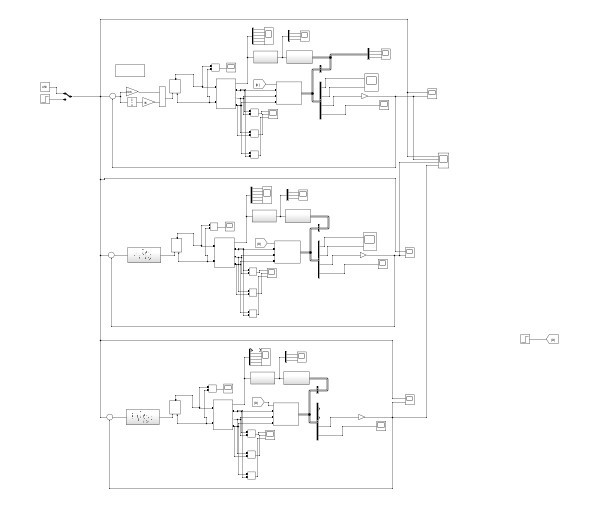
直流无刷电机的pid,模糊pid和模糊神经网络pid控制。 含有模糊规则设置的参考文献,模糊神经网络设置的参考网址,适合往这个方向学习的伙伴。
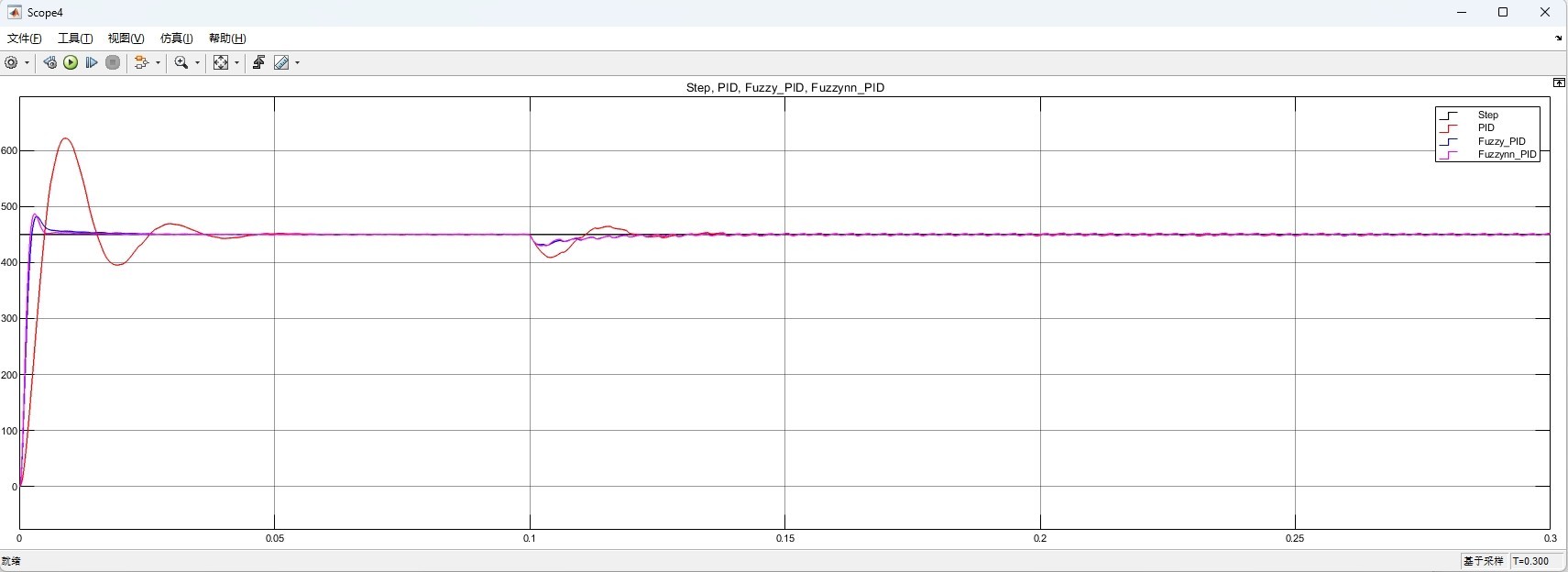
直流无刷电机控制是个既硬核又有趣的领域,特别是当传统PID遇上智能算法时,就像给老司机装上了自动驾驶系统。咱们今天不聊那些枯燥的理论推导,直接上手看看PID、模糊PID和神经网络PID在代码里怎么折腾。
传统PID:直男的倔强
先看经典PID的代码实现,简单粗暴到让人心疼:
class PID:
def __init__(self, Kp, Ki, Kd):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.last_error = 0
self.integral = 0
def update(self, error, dt):
self.integral += error * dt
derivative = (error - self.last_error) / dt
output = self.Kp*error + self.Ki*self.integral + self.Kd*derivative
self.last_error = error
return output这代码就像直男送口红——参数全靠蒙。Kp调大了电机抖得跟帕金森似的,Kd给猛了响应速度能慢成树懒。实测时至少得摔坏三个电机才能调出勉强能用的参数。
模糊PID:给算法加点情商
模糊控制就像给PID装了个自适应大脑,比如设定"转速误差大时使劲调,误差小时温柔点"这样的规则:
rules = [
IF (error is 'Large') THEN (Kp_change is 'Big'),
IF (error is 'Small') AND (d_error is 'Positive') THEN (Ki_change is 'Slight')
]实际项目里可以参考《模糊控制原理与工程应用》(王立新著)里的规则库设计,比纯自己瞎编靠谱多了。GitHub上有个FuzzyPID项目(地址后附),里面用三角隶属函数实现的自整定策略贼实用。
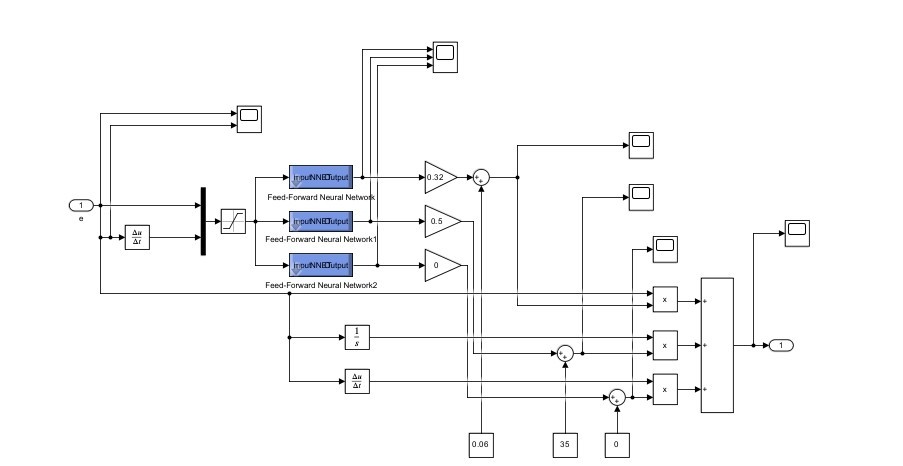
神经模糊PID:学霸的骚操作
当模糊控制遇上神经网络,就像给模糊规则插上了学习翅膀。用PyTorch搭个简单的网络结构:
class NeuroFuzzy(nn.Module):
def __init__(self):
super().__init__()
self.fc1 = nn.Linear(3, 5) # 输入error, d_error, integral
self.fc2 = nn.Linear(5, 3) # 输出Kp, Ki, Kd调整量
def forward(self, x):
x = torch.relu(self.fc1(x))
return torch.sigmoid(self.fc2(x)) * 0.2 # 限制参数变化幅度这个网络相当于给PID装了个智能手表,能根据实时数据动态微调参数。训练时记得用移动窗口数据,不然电机运行数据能把内存撑爆。想深入玩的可以去PapersWithCode网站搜"ANFIS",里面有结合模糊推理和神经网络的经典实现。
学习路线推荐
- 先吃透《先进PID控制MATLAB仿真》这本实战手册
- 在GitHub搜"FuzzyBLDC"能找到不少开源项目(比如FuzzyBLDC-Control仓库)
- 进阶必备:IEEE的《A Neural Fuzzy Controller for Brushless DC Motors》论文
- 调参苦手必备:某宝50块钱的直流无刷开发板,烧了不心疼
最后说句大实话:别指望哪个算法能通吃所有场景。上周拿实验室电机做测试,传统PID在空载时稳如狗,一带负载立马翻车;神经模糊倒是适应性强,但运行时占用的算力能让STM32哭出声。所以啊,搞控制就像谈恋爱——合适最重要,别盲目追新。

















 22
22

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









