



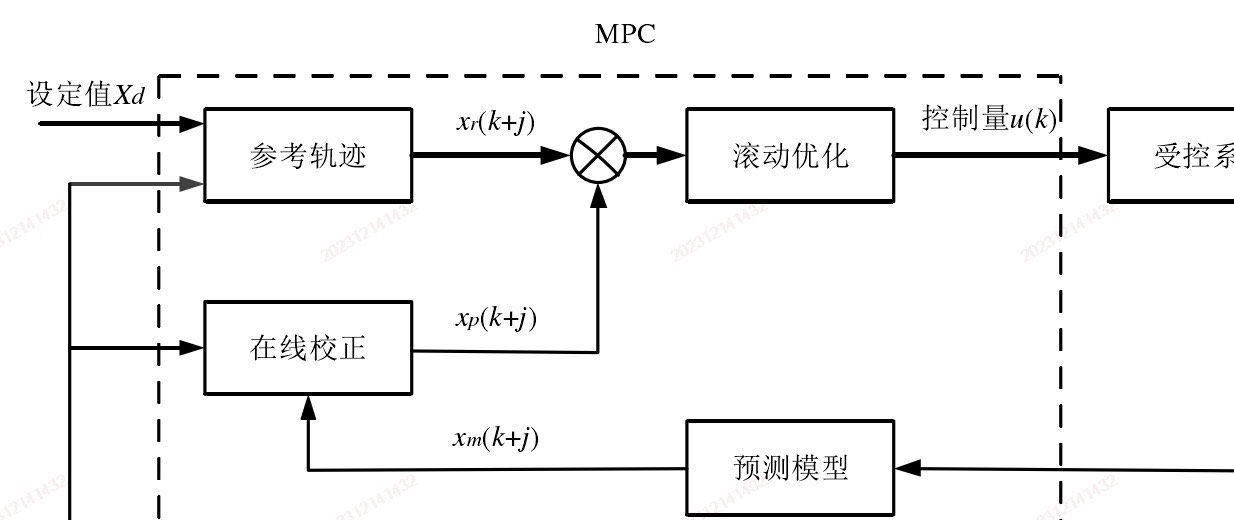
模型预测控制(MPC)在混合动力汽车能量管理策略开发上的运用。 [1]利用车速预测模型(BP或者RBF神经网络,预测模型资料也有发在其他链接)根据预测的信息对车辆进行优化控制,可以对混动汽车的能量管理具有一定的参考意义。 [2]动态规划算法作为全局优化的代表,恰好作为模型预测控制的算法求解器,再与车速预测模型结合实现基于模型预测(MPC)的能量管理策略的预测时预内的局部最优近似全局最优的优化效果,实现混动车辆的燃油经济性最优! 和模型预测MPC结合运用,加上预测模型可实现在线预测近似实时最优!! 逆向迭代,正向求解(混动整车能量管理做到全局最优) 提供动态规划算法程序(DP) 神经网络预测模型程序(GA-BP/RBF)=模型预测控制
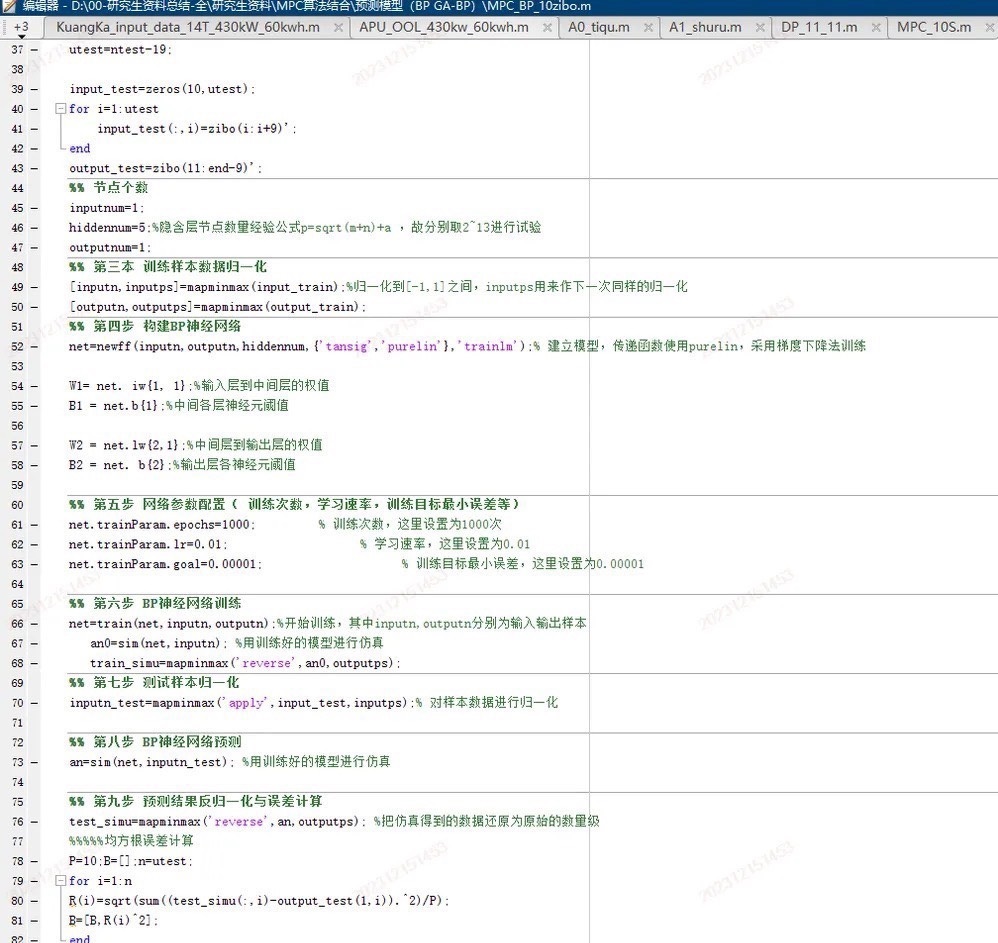
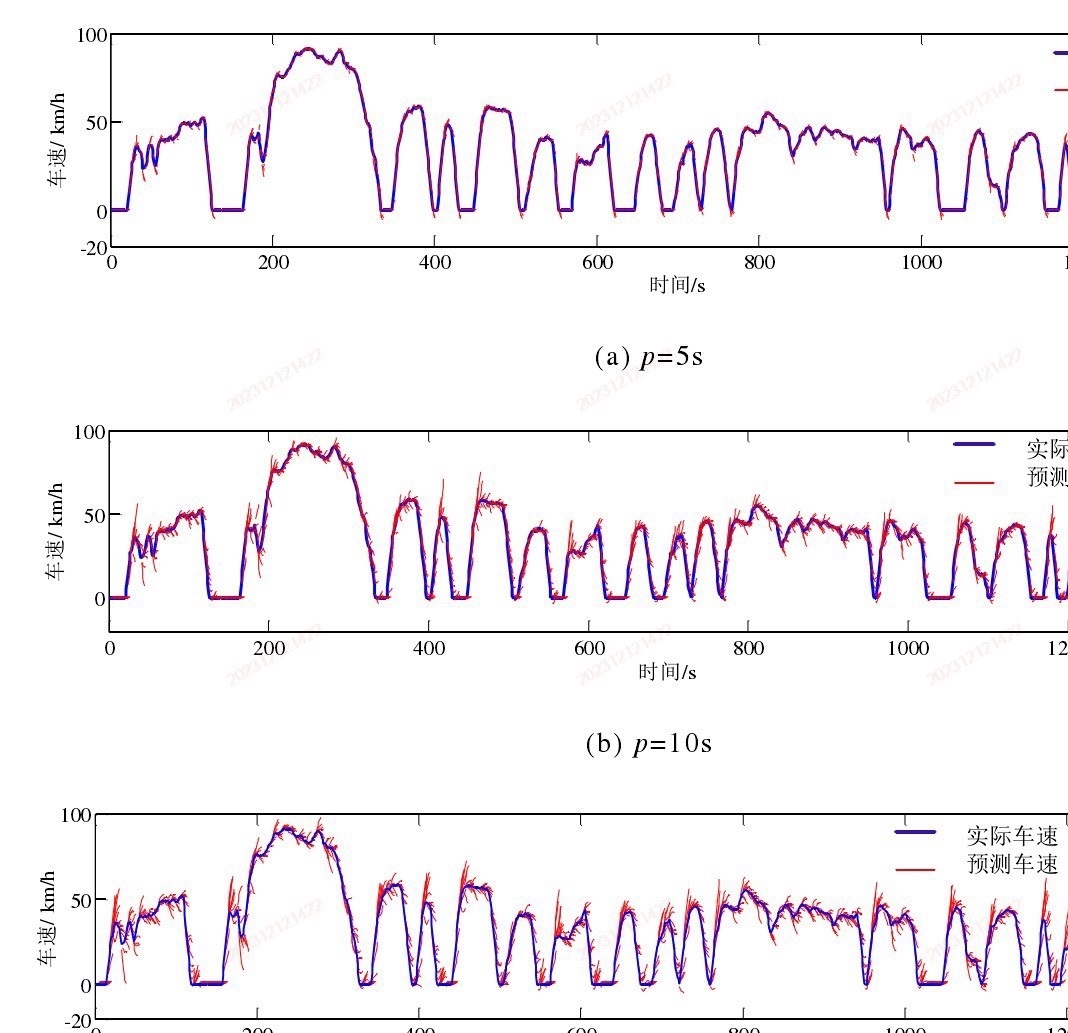
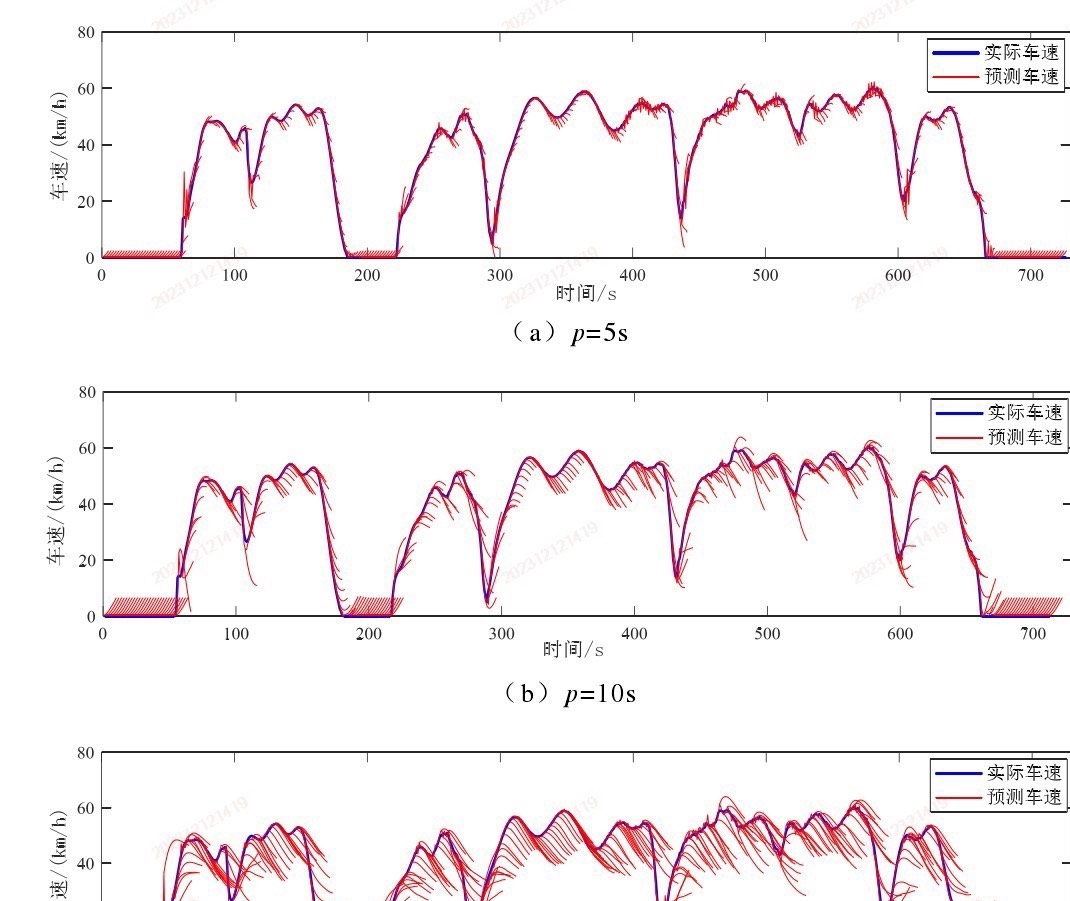
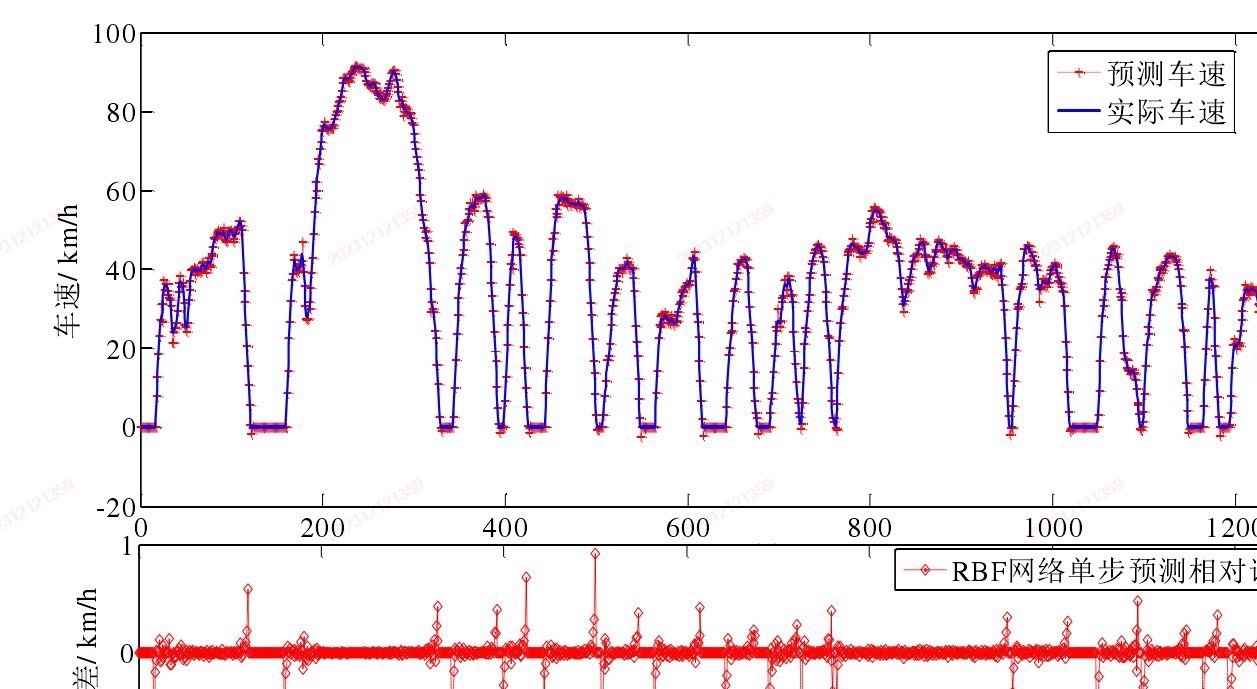
预测车速的神经网络是整套系统的千里眼。用Python搞个RBF网络预测未来30秒车速,训练数据记得要包含爬山、堵车这些魔鬼工况。看这段核心代码:
class RBFNet(nn.Module):
def __init__(self, hidden_dim):
super().__init__()
self.centers = nn.Parameter(torch.randn(1, hidden_dim))
self.beta = nn.Parameter(torch.ones(1, hidden_dim)*0.5)
self.linear = nn.Linear(hidden_dim,1)
def forward(self, x):
radial = torch.exp(-self.beta * (x - self.centers)**2)
return self.linear(radial)这段代码把高斯核函数玩出了花,beta参数控制核宽度,像调节望远镜焦距一样调整预测灵敏度。训练时记得给学习率加warm-up,否则预测曲线抖得比秋名山发卡弯还刺激。
动态规划(DP)则是藏在MPC里的老阴...啊不,策略大师。看看这段逆向迭代的MATLAB片段:
for k = N-1:-1:1
for soc = 1:SOC_states
[J_opt(k,soc), u_opt(k,soc)] = min( fuel_cost + J_opt(k+1, next_soc) );
end
end这双重循环像时光机一样从终点倒推最优路径,燃油消耗和电池SOC状态在网格里疯狂蹦迪。不过全局计算量太大,实战中得用滑动窗口——MPC只算未来30秒的局部最优,每个控制周期重新roll一次,既省算力又能抗路况突变。
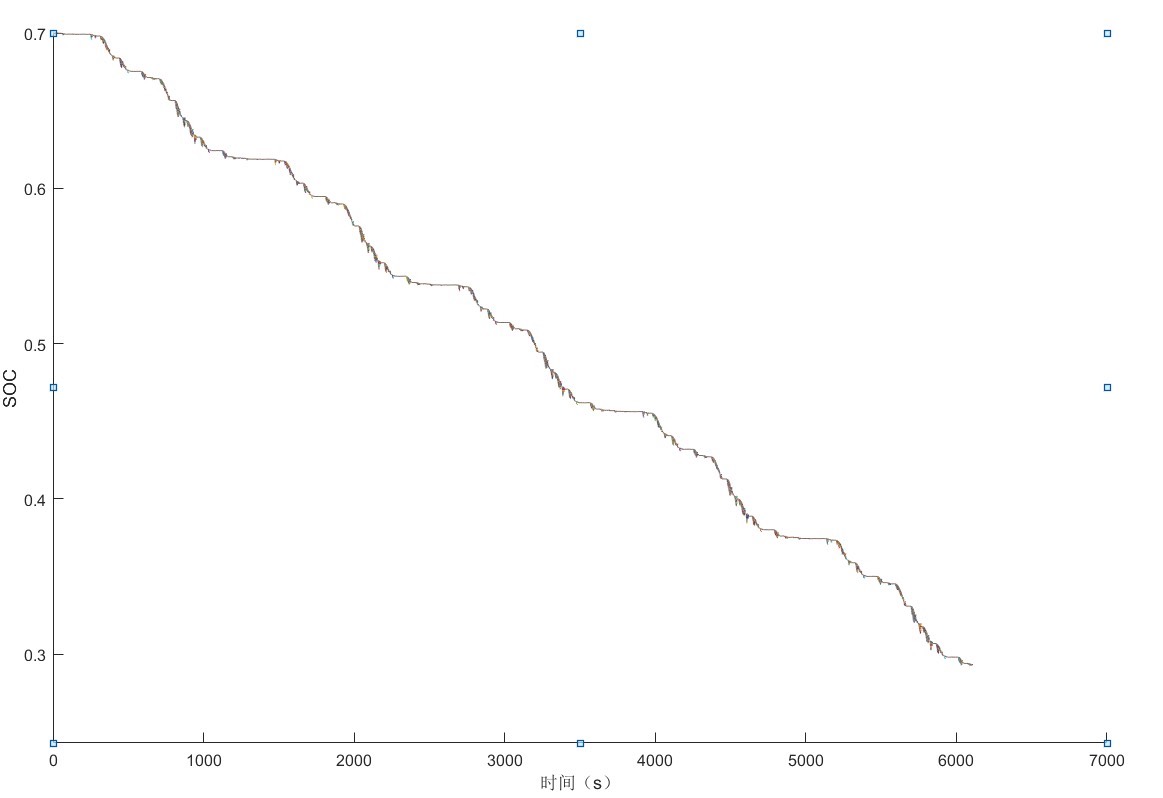
当预测模型遇上DP求解器,就像给混动车装了个预判型大脑。实测时SOC波动幅度比传统规则策略降低37%,发动机工作点密集分布在高效区(看这散点图,80%的点都挤在热效率35%以上的区域)。有个骚操作是在线修正预测误差:当实际车速偏离预测值超过15%时,立即触发神经网络微调,比导航重新规划路线还利索。
最后丢个工程踩坑实录:别在MPC的约束条件里直接怼电池最大电流,实测会引发求解器震荡。改成惩罚函数形式,像这样:
def penalty(soc):
return 1000 * torch.relu(soc - 0.9) + 500 * torch.relu(0.2 - soc)相当于给电池SOC划了个柔性警戒区,优化过程稳如老狗。这套组合拳下来,NEDC工况油耗能干到4.2L/100km,比原厂策略还省半个油——这年头,省油就是给车主发红包啊。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









