



基于组态王和MATLAB的三容水箱液位控制 。 包含以下内容: 1.三容水箱的模型构建; 2.解耦算法; 3.组态监控画面的绘制; 4.组态王和simulink通过opc通讯,实现数据传输; 5.绘制的gui窗口可以控制simulink的启停。 6.还有2w+字的报告。
一、前言
在自动化控制领域,三容水箱液位控制是一个经典且实用的研究场景。通过结合组态王强大的监控功能与MATLAB卓越的算法处理能力,我们能构建出高效、精准的液位控制系统。本文将深入探讨基于这两者的三容水箱液位控制实现过程。
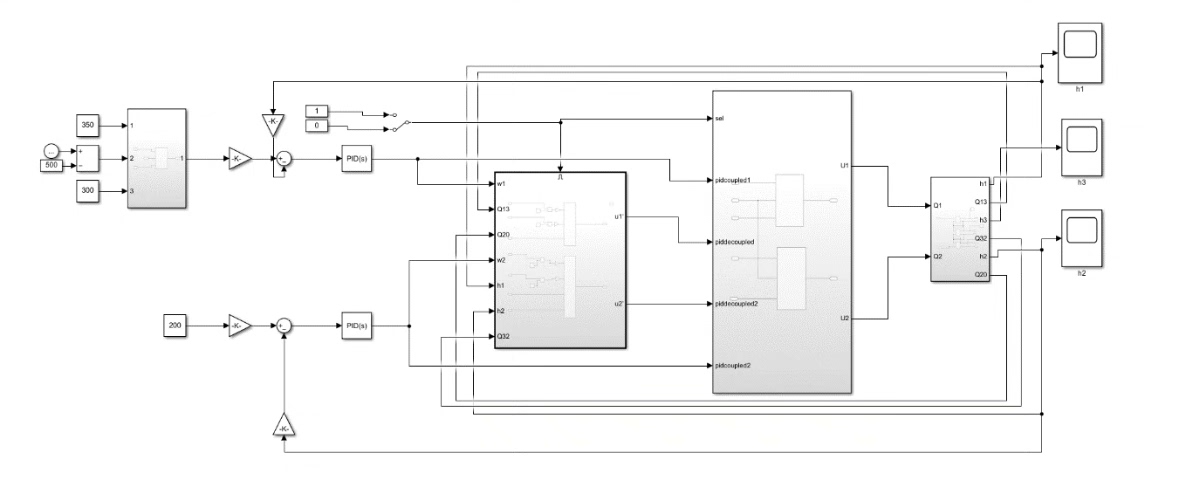
二、三容水箱的模型构建
三容水箱由三个相互连接的水箱组成,其动态特性可以通过流体力学原理来描述。以图1所示的典型三容水箱结构为例(此处可自行想象一个简单的三容水箱连接示意图),假设每个水箱的横截面积为$Ai$($i = 1,2,3$),水箱间连接管道的流量系数为$C{ij}$($i,j = 1,2,3$且$i\neq j$),流入水箱的流量为$q{in,i}$,流出水箱的流量为$q{out,i}$,水箱液位高度为$h_i$。
根据质量守恒定律,对于每个水箱有如下动态方程:
$Ai\frac{dhi}{dt} = q{in,i} - q{out,i} + \sum{j\neq i}C{ij}(hj - hi)$
在MATLAB中,我们可以通过Simulink来搭建这个模型。以下是简单的Simulink模型搭建思路代码片段(伪代码):
% 创建模型
model = 'ThreeTankModel';
new_system(model);
% 添加积分模块模拟水箱动态
for i = 1:3
integrator = add_block('simulink/Continuous/Integrator', [model, '/Integrator_', num2str(i)]);
set_param(integrator, 'InitialCondition', '0');
end
% 添加求和模块计算净流量
for i = 1:3
summer = add_block('simulink/Math Operations/Sum', [model, '/Summer_', num2str(i)]);
set_param(summer, 'Inputs', '++-'); % 根据具体连接关系调整
end
% 连接各个模块
% 这里省略复杂的连接关系代码,大致思路是将积分模块的输出连接到求和模块的相关输入,
% 求和模块的输出连接到积分模块的输入,模拟质量守恒动态这样,我们就在Simulink中初步构建了三容水箱的动态模型。
三、解耦算法
由于三容水箱各水箱间存在相互耦合关系,直接控制较为困难,因此需要解耦算法。常见的解耦算法有基于前馈补偿的解耦等。
以基于前馈补偿的解耦为例,假设我们要控制水箱1和水箱2的液位。首先需要建立耦合系统的传递函数矩阵$G(s)$:
$G(s)=\begin{bmatrix} G{11}(s) & G{12}(s) \\ G{21}(s) & G{22}(s) \end{bmatrix}$
然后设计解耦补偿器$D(s)$,使得$G(s)D(s)$为对角矩阵,即实现解耦。在MATLAB中可以通过如下代码来计算解耦补偿器(假设已获取传递函数矩阵$G$):
% 计算解耦补偿器
[numG, denG] = tfdata(G, 'v');
n = length(numG);
D = cell(n, n);
for i = 1:n
for j = 1:n
if i == j
D{i,j} = tf(1, [1 0]); % 单位传递函数
else
D{i,j} = tf(-numG{i,j} / numG{i,i}, denG{i,j}); % 前馈补偿计算
end
end
end
D_system = append(D{:});这段代码根据传递函数矩阵$G$计算出了解耦补偿器$D$,将其引入控制系统后,能有效降低各水箱间的耦合影响,提高控制精度。
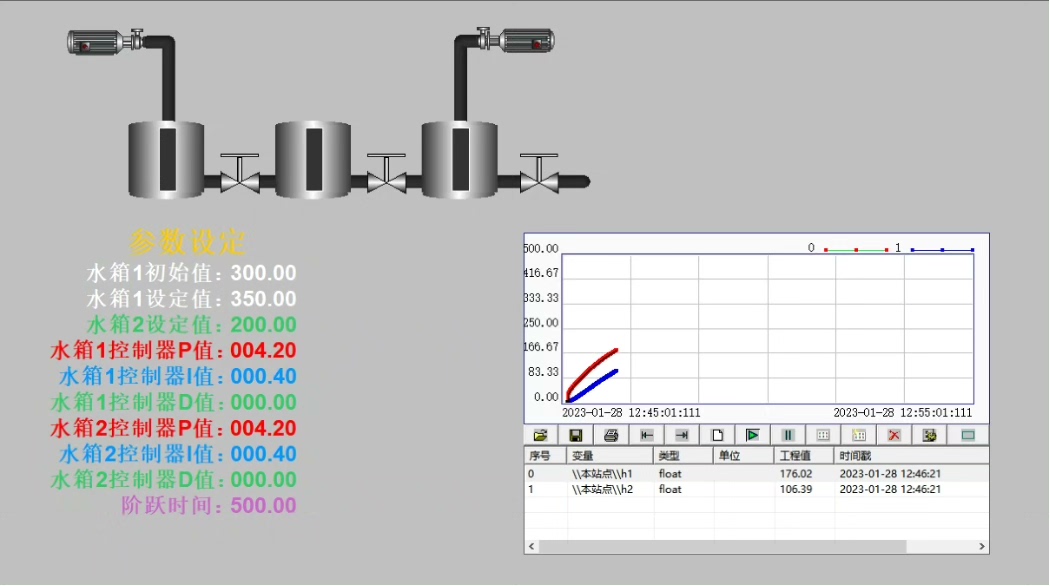
四、组态监控画面的绘制
组态王提供了丰富的图形绘制工具来创建监控画面。首先,打开组态王软件,进入工程画面编辑界面。
- 绘制水箱图形:利用绘图工具绘制三个水箱的形状,并设置不同的颜色以便区分。通过动画连接功能,将水箱的液位高度与实际变量关联。例如,选中水箱图形,在动画连接中设置填充属性与水箱液位变量相关联,这样随着液位变化,水箱图形的填充高度也会相应改变。
- 添加仪表显示:添加数值显示控件,用于实时显示各个水箱的液位值。同样通过动画连接,将控件的显示值与对应的液位变量绑定。
- 绘制管道和阀门:绘制连接水箱的管道,并添加阀门图形。对于阀门,可以设置其开关状态的动画连接,方便操作人员在监控画面上进行阀门控制操作。
五、组态王和Simulink通过OPC通讯,实现数据传输
- 配置OPC服务器:在MATLAB中,首先需要配置OPC服务器以便与组态王进行通讯。可以使用MATLAB的OPC Toolbox。以下是简单的配置代码:
opcServer = opcserver('Matrikon.OPC.Simulation.1'); % 根据实际OPC服务器类型修改
connect(opcServer);这段代码连接到指定的OPC服务器。
- 创建OPC组和项:
% 创建组
opcGroup = addgroup(opcServer, 'MyGroup');
% 创建项,假设要传输水箱1液位
opcItem1 = additem(opcGroup, 'Random.Int1'); % 根据实际OPC服务器项名称修改,这里假设为随机整数项模拟液位这里创建了一个组,并在组中添加了要传输数据的项。
- 组态王配置:在组态王中,进入设备管理,添加OPC设备。按照向导提示,选择之前配置的OPC服务器。然后建立变量与OPC项的关联,这样就可以实现组态王与Simulink之间的数据传输,比如将Simulink中计算得到的水箱液位数据实时传输到组态王的监控画面上显示。
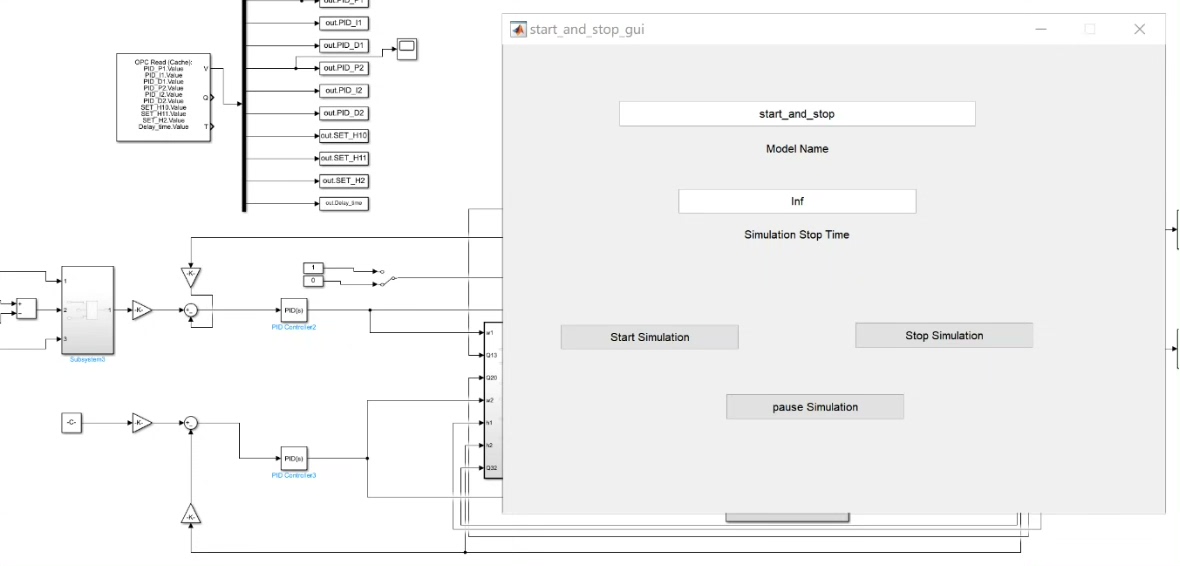
六、绘制的GUI窗口可以控制Simulink的启停
在MATLAB中,利用GUIDE工具可以绘制一个简单的GUI窗口。
- 绘制界面:打开GUIDE,绘制一个包含“启动”和“停止”按钮的窗口。
- 添加回调函数:为“启动”按钮添加回调函数,代码如下:
function startButton_Callback(hObject, eventdata, handles)
sim('ThreeTankModel'); % 启动Simulink模型,模型名称根据实际修改
end为“停止”按钮添加回调函数:
function stopButton_Callback(hObject, eventdata, handles)
set_param('ThreeTankModel', 'SimulationCommand','stop'); % 停止Simulink模型
end这样,通过在GUI窗口上点击按钮,就可以方便地控制Simulink模型的启停,实现更人性化的操作。
七、关于2w + 字的报告
在完成上述基于组态王和MATLAB的三容水箱液位控制实现后,撰写一份2w + 字的报告是很有必要的。报告内容应详细阐述整个实现过程,包括理论基础、模型构建细节、算法推导、组态王与MATLAB的配置步骤、实验结果分析等。同时,还可以对系统的性能进行评估,如控制精度、响应时间等,并探讨可能的优化方向。报告不仅是对项目的总结,也是对研究过程的深入反思与经验积累,能为后续相关研究和应用提供有力的参考。
通过以上各个环节的紧密配合,我们成功实现了基于组态王和MATLAB的三容水箱液位控制,从模型构建到实际监控与控制操作,充分发挥了两者的优势,为自动化液位控制领域提供了一个实用的解决方案。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









