 基于单片机的定速巡航系统设计
基于单片机的定速巡航系统设计




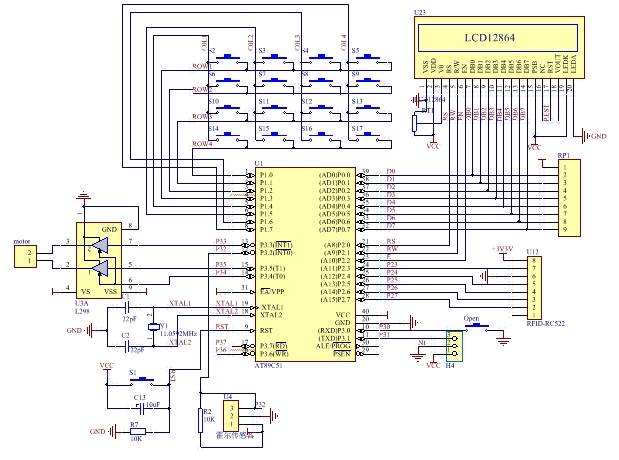
单片机的定速巡航系统设计。 该系统以单片机为核心,外部结合速度传感器,通过PWM的方式控制电机转速,并通过PID算法实时控制汽车的车速。 用户可以通过按键设置当前的汽车定速值,当车速当前略低于设定速度时,系统自动控制加速,当速度高于定速设定值时,自动启动减速操作,从未实现定速巡航的效果。 同时,将汽车当前的车速实时测量出来,并显示在显示器上。
基于单片机的定速巡航系统代码功能说明
引言
随着汽车工业的快速发展,定速巡航系统已成为现代汽车中不可或缺的安全驾驶辅助功能。
本文详细阐述了一款基于单片机的定速巡航系统的代码功能,该系统通过PWM方式控制电机转速,并利用PID算法实现车速的实时调节,确保汽车在设定速度下稳定行驶。
系统概述
本系统以单片机为核心,外部连接速度传感器、电机驱动电路、显示电路及按键电路,共同实现定速巡航功能。
系统主要分为硬件设计和软件设计两大部分,其中软件设计涵盖了主程序、显示子程序、电机转速控制子程序及PID控制算法等关键模块。
软件功能模块
主程序
主程序是整个系统的控制中枢,负责初始化系统参数、调用各子程序并维持系统循环运行。
系统启动后,主程序首先完成定时器、中断及LCD显示器的初始化工作,随后进入无限循环,不断检测按键输入、调用显示子程序更新车速信息,并根据PID算法调整电机转速,实现定速巡航。
核心功能
系统初始化:配置定时器、中断及LCD显示器。
循环检测:持续监测按键输入,更新显示信息,并根据需要调整电机转速。
显示子程序
显示子程序负责将当前车速、设定车速及占空比等信息实时显示在LCD屏幕上。
系统采用LCD12864显示器,支持中英文及特殊符号显示,提供清晰直观的界面反馈。
核心功能
LCD初始化:配置LCD显示器的工作模式及显示参数。
数据显示:将车速、设定车速及占空比等信息转换为LCD可识别的格式并显示。
电机转速控制子程序
电机转速控制子程序通过PWM(脉宽调制)技术调节电机转速。
系统根据PID算法的输出结果调整PWM波的占空比,从而控制电机的转速,实现车速的精确调节。
核心功能
PWM生成:利用定时器中断生成特定占空比的PWM波。
转速调节:根据PID算法的输出调整PWM波的占空比,控制电机转速。
PID控制算法
PID控制算法是本系统的核心,通过实时计算当前车速与设定车速的偏差,利用比例(P)、积分(I)、微分(D)三个环节的综合作用,生成控制量调整PWM波的占空比,实现车速的稳定控制。
核心功能
偏差计算:实时计算当前车速与设定车速的偏差。
PID运算:根据偏差值进行比例、积分、微分运算,生成控制量。
占空比调整:根据PID运算结果调整PWM波的占空比。
按键扫描与处理子程序
按键扫描与处理子程序负责检测用户的按键输入,并根据输入执行相应的操作,如设定车速、启动/停止定速巡航等。
系统采用矩阵键盘设计,有效节约了IO口资源。
核心功能
按键扫描:定期检测矩阵键盘的按键状态。
按键处理:根据检测到的按键状态执行相应的操作,如调整设定车速。
系统工作原理
系统启动后,主程序首先完成初始化工作,随后进入无限循环。
在循环中,系统不断检测按键输入,更新显示信息,并根据PID算法调整电机转速。
具体工作流程如下:
初始化:配置定时器、中断、LCD显示器及PWM输出。
按键检测:定期扫描矩阵键盘,检测用户输入。
显示更新:根据当前车速、设定车速及占空比等信息更新LCD显示。
PID控制:根据当前车速与设定车速的偏差进行PID运算,生成控制量。
转速调节:根据PID运算结果调整PWM波的占空比,控制电机转速。
循环执行:重复上述步骤,实现定速巡航的持续控制。
结论
本文详细阐述了一款基于单片机的定速巡航系统的代码功能。
该系统通过PWM方式控制电机转速,并利用PID算法实现车速的实时调节,具有控制精确、响应迅速等优点。
通过合理的软件设计,系统能够稳定运行并实现定速巡航功能,为现代汽车的安全驾驶提供了有力支持。

















 397
397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









