



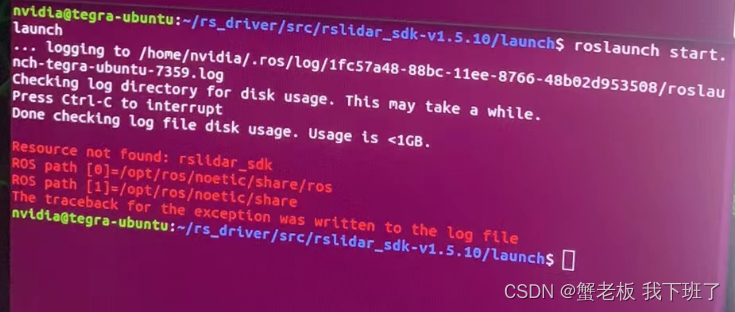
每次在执行文件时可能都会遇到如下错误,都需要source devel/set up.bash一次。
可以通过.bashrc实现每次打开终端自动source,方法如下:
打开终端,执行以下命令:
gedit ~/.bashrc
在弹出的文档最后一行加入如下命令,记得是自己的路径:
source ~/ros/devel/setup.bash
然后保存,之后再.catkin_make,就无须再source就能正常运行
 本文介绍了如何通过编辑~/.bashrc文件,在每次打开终端时自动sourceROS的setup.bash脚本,以避免每次执行文件时手动操作,提高开发效率。
本文介绍了如何通过编辑~/.bashrc文件,在每次打开终端时自动sourceROS的setup.bash脚本,以避免每次执行文件时手动操作,提高开发效率。
每次在执行文件时可能都会遇到如下错误,都需要source devel/set up.bash一次。
可以通过.bashrc实现每次打开终端自动source,方法如下:
打开终端,执行以下命令:
gedit ~/.bashrc
在弹出的文档最后一行加入如下命令,记得是自己的路径:
source ~/ros/devel/setup.bash
然后保存,之后再.catkin_make,就无须再source就能正常运行
 1万+
2922
1万+
2922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























