






一、建立工作空间
1、创建工作空间
mkdir p~/catkin ws/src
cd ~/catkin ws/
catkin make
2.创建功能包
cd ~/catkin ws/src
#创建名为 IMU_package的功能包
catkin_create_pkg IMU_package rospy std_msgs
3.添加Python脚本创建scripts目录(存放Python程序):
cd IMU_package
mkdir scripts
cd scripts
4、报错 /usr/bin/env: ‘python\r’: No such file or directory
sudo apt update sudo apt install dos2unix
dos2unix IMU_xujun.py
5、设置文件可执行权限:
chmod +x publisher_node.py
chmod +x subscriber_node.py
6、修改package.xml
确认以下依赖已包含:
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
7、编译工作空间
cd ~/catkin_ws
catkin_make
source devel/setup.bash # 激活环境变量
8. 运行程序
终端1:启动ROS核心
roscore
终端2:运行发布程序
rosrun IMU_package IMU_xujun.py
9、订阅节点话题
rostopic list
rostopic echo /imu_data
二、开发读取程序
#!/usr/bin/env python3
import rospy
import serial
from sensor_msgs.msg import Imu # 根据实际数据类型选择合适的消息类型
def read_imu_data(port, baudrate):
"""
读取串口中的惯导数据
:param port: 串口号
:param baudrate: 波特率
:return: 解析后的惯导数据
"""
try:
ser = serial.Serial(port, baudrate, timeout=1)
if not ser.is_open:
rospy.logerr("无法打开串口")
return None
while not rospy.is_shutdown():
if ser.in_waiting > 0:
data = ser.readline().decode().strip() # 读取一行数据并解码
# 在这里解析数据并转换为合适的格式
# 假设数据格式为 "ax,ay,az,wx,wy,wz"
print("原始数据",data)
print(type(data))
try:
imu_data = list(map(str, data.split(',')))
print("转换后",imu_data)
return imu_data
except ValueError:
rospy.logwarn("解析数据失败")
continue
except serial.SerialException as e:
rospy.logerr("串口错误: %s", e)
return None
def imu_publisher():
# 初始化 ROS 节点
rospy.init_node('imu_publisher', anonymous=True)
# 配置串口参数
port = rospy.get_param('~port', '/dev/ttyUSB0') # 默认串口号
baudrate = rospy.get_param('~baudrate', 115200) # 默认波特率
# 创建 Imu 消息对象
imu_msg = Imu()
imu_msg.header.frame_id = "imu_link" # 设置参考系
# 创建发布者,发布 IMU 数据到话题 "imu_data"
pub = rospy.Publisher('imu_data', Imu, queue_size=10)
rate = rospy.Rate(100) # 设置发布频率为 100Hz
while not rospy.is_shutdown():
imu_data = read_imu_data(port, baudrate)
if imu_data is not None:
# 填充消息数据
imu_msg.header.stamp = rospy.Time.now()
imu_msg.angular_velocity.x = float(imu_data[2])
imu_msg.angular_velocity.y = float(imu_data[3])
imu_msg.angular_velocity.z = float(imu_data[4])
imu_msg.linear_acceleration.x = float(imu_data[5])
imu_msg.linear_acceleration.y = float(imu_data[6])
imu_msg.linear_acceleration.z = float(imu_data[7])
# 发布消息
pub.publish(imu_msg)
rospy.loginfo("发布 IMU 数据成功")
rate.sleep()
if __name__ == '__main__':
try:
imu_publisher()
except rospy.ROSInterruptException:
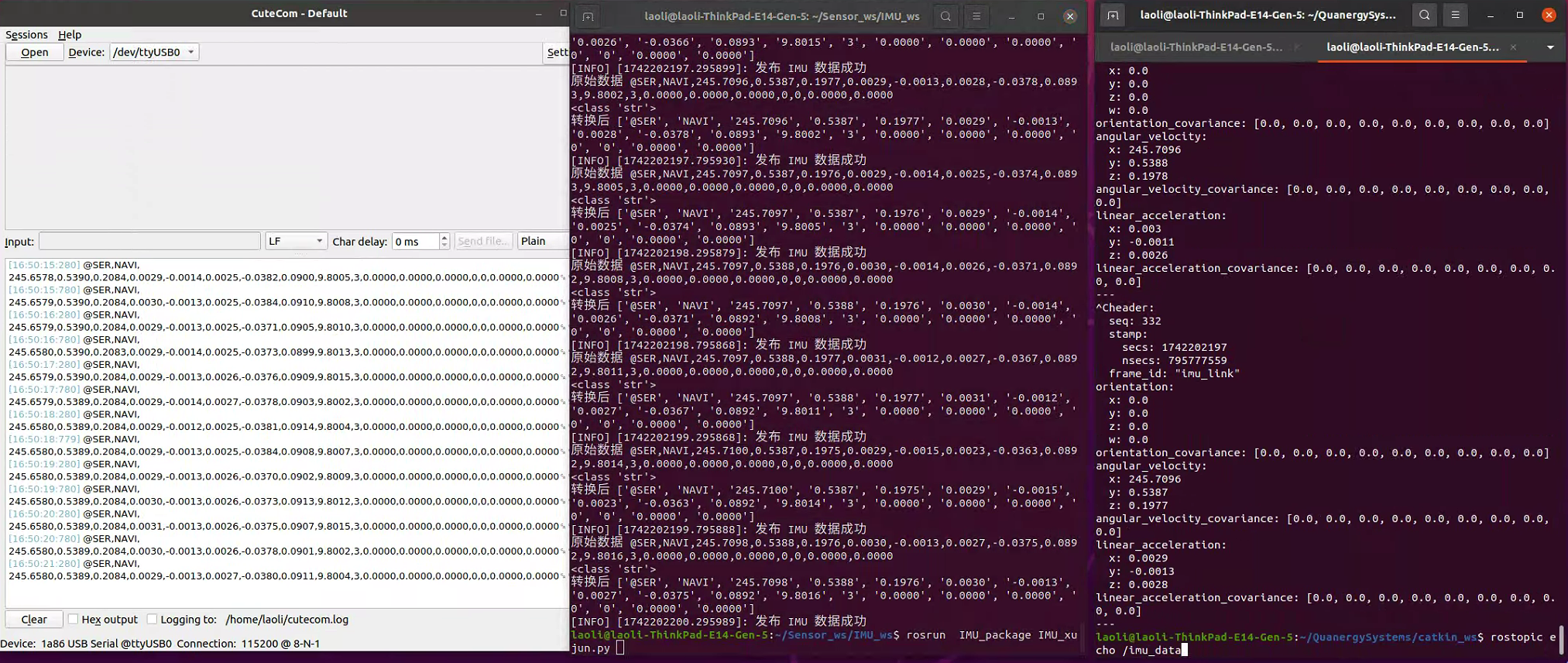
pass三、测试界面

















 124
124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









