






 本文深入探讨3D数学中的矩阵变换,包括矩阵乘法、线性变换、仿射变换等核心概念,并详细解析旋转、缩放、正交投影等变换方式及其实现方法。
本文深入探讨3D数学中的矩阵变换,包括矩阵乘法、线性变换、仿射变换等核心概念,并详细解析旋转、缩放、正交投影等变换方式及其实现方法。
3D数学 学习笔记(2) 矩阵
参考书籍:
《3D数学基础:图形与游戏开发》
矩阵乘法
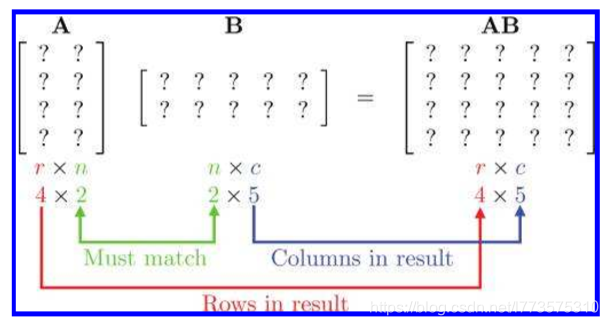
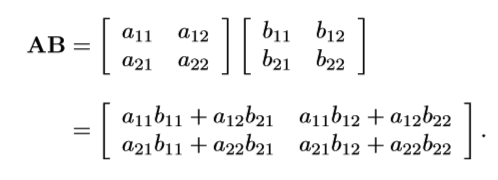
常用等式
** I 为单位矩阵,k为标量,v、w为向量。
- MI = IM = M
- AB ≠ BA
- (AB)C = A(BC)
- (kA)B = k(AB) = A(kB)
- (vA)B = v(AB)
- (AB)T =BTAT (可扩展多个矩阵)
- (v + w)M = vM + wM
注意:用矩阵ABC转换向量v时,用行向量记法为vABC,转换从左往右。用列向量记法为CBAv,转换从右往左。
理解为变换向量
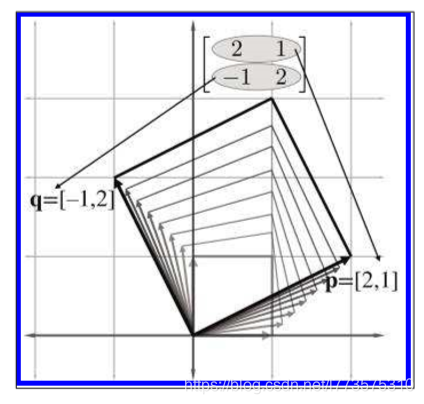
矩阵和线性变换
旋转

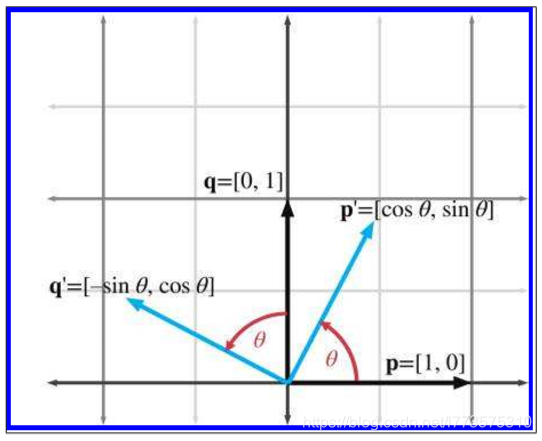
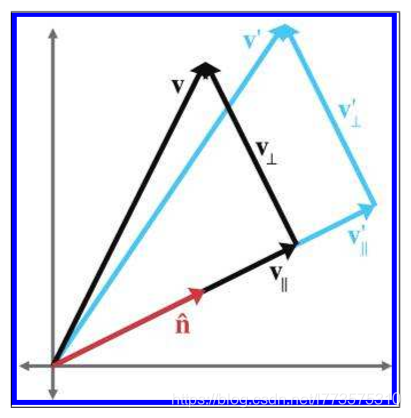
- 绕任意轴(单位向量n)旋转: v′ = v R(n,θ)
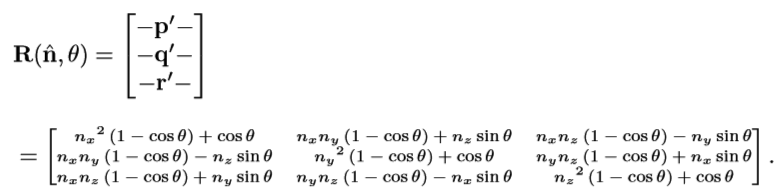
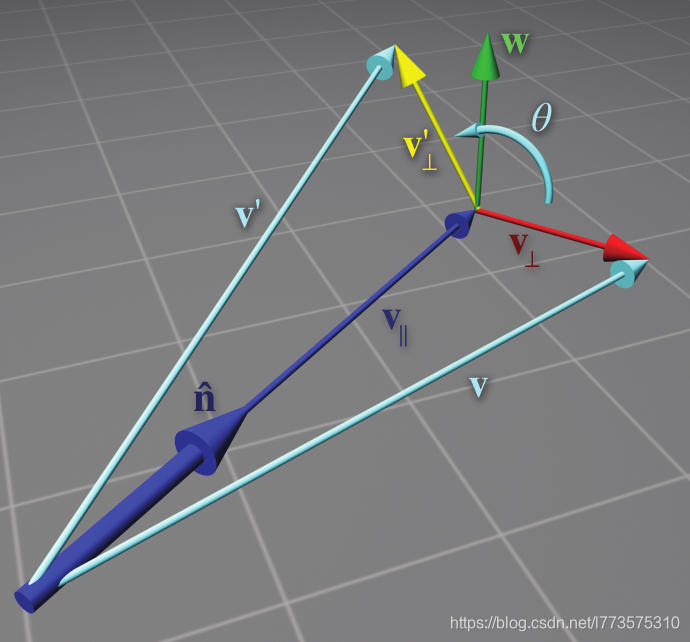
推导思路:
- 计算出旋转后的垂直分量(v′ ⊥)与映射到旋转轴的平行分量(v||)相加即可。
- v|| = ( v · n ) n
- v′⊥ = cosθv⊥ + sinθw
- w = n × v⊥
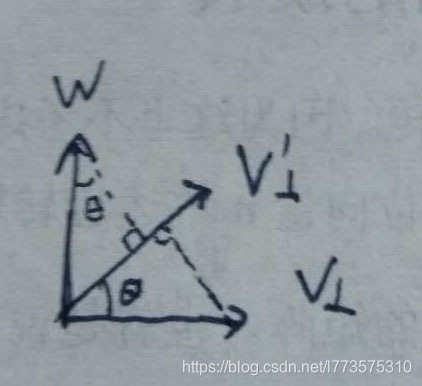
缩放
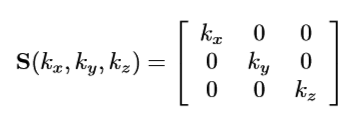
- 绕任意轴(单位向量n)缩放: v′ = v R(n,θ)
推导思路:
- 通过轴缩放可知道其映射(v′||)也是相同缩放比例(k),垂直分量不变,所以直接相加即可。
- v′ = v′|| + v′⊥
- v′|| = kv||
- v′⊥ = v⊥
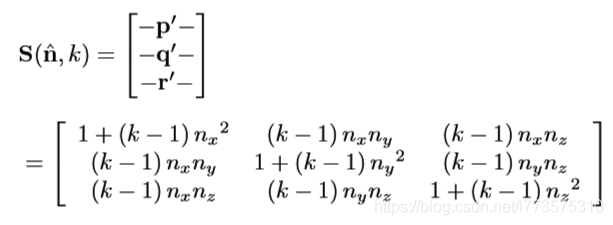
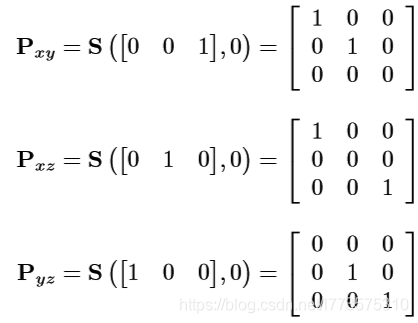
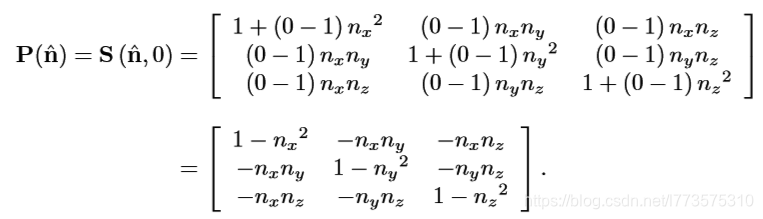
正交投影
投影意味着降维操作(如三维到二维)。正交投影实际是使某个方向用0做缩放因子,将所有点(P)做缩放。
例:Pxy , 投影到xy平面,即只变换z值,缩放因子为0。
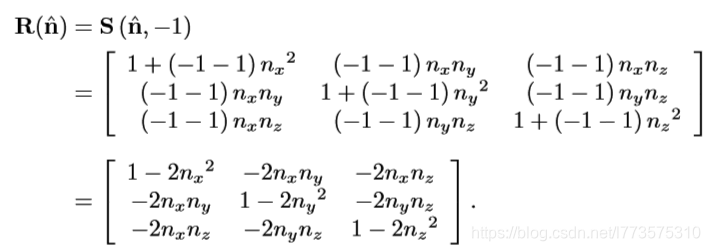
镜像(反射)
即使用缩放因子-1做缩放。
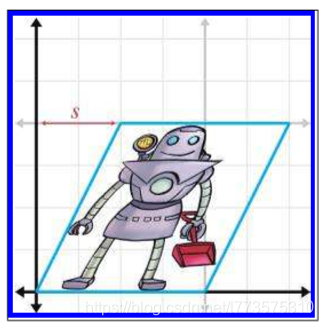
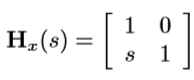
切变(扭曲变换)
例:Hx,x坐标根据坐标y切变。
例:Hxy,xy坐标被坐标z改变。

变化的组合
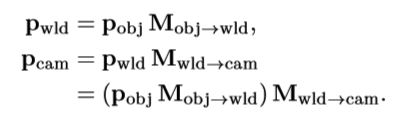
因为矩阵的行向量其实就是变换后的基向量,所以两个矩阵相乘可以简化。

线性变换
如果F保持了基本运算:加法和数量乘,那该映射为线性的。
仿射变换
线性变换后接着平移。
- v′ = vM + b
可逆变换
如果存在一个逆变换可以“撤销”原变换,那该变换是可逆的。线性变换中除了投影,其他都可以“撤销”。
- F−1(F(a)) = F(F−1(a)) = a 。
等角变换
两个向量变换前后夹角大小和方向都不变。只有平移、旋转和均匀缩放是等角变换。
正交变换
轴保持互相垂直,而且不进行缩放变换。只有平移、旋转和镜像是正交变换。长度、角度、面积、体积都保持不变。
刚体变换(正规变换)
只有平移和旋转是刚体变换。
变换类型小结
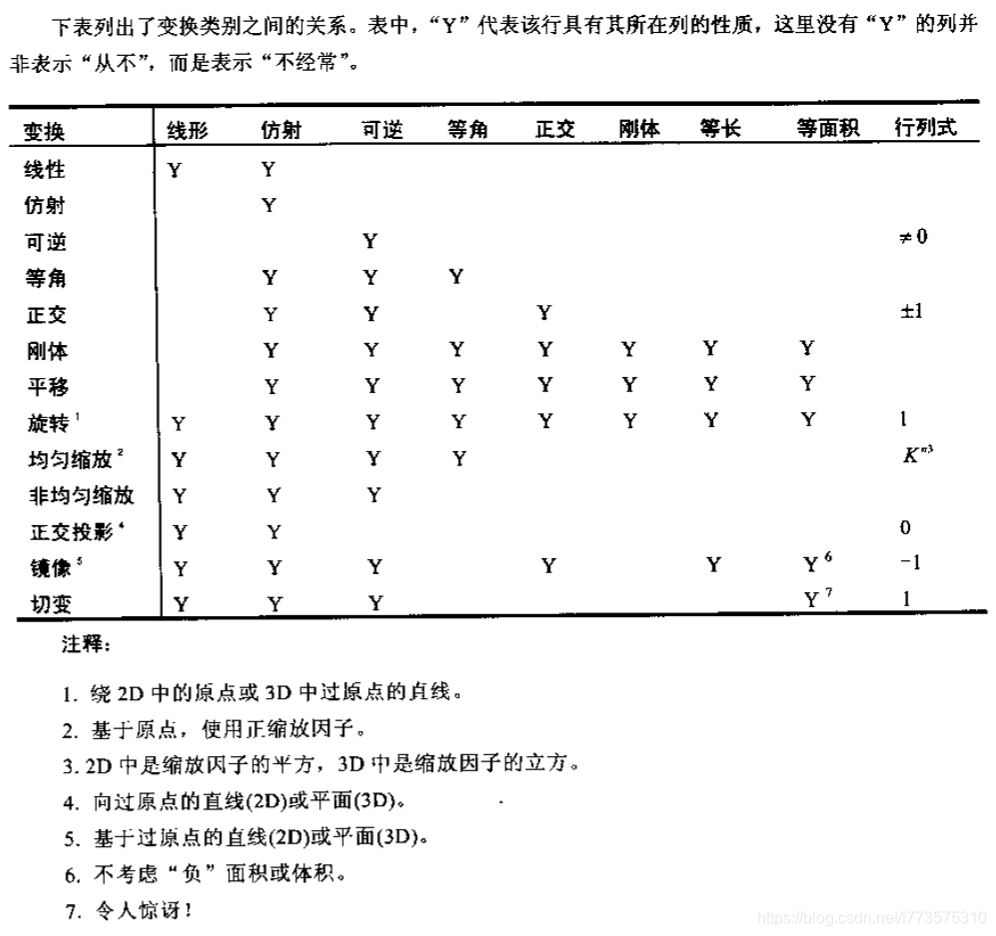
注释7其实没什么好惊讶的。因为切变可以理解为平行四边形内角的变化而已,而其高度和底边长短都没变,所以面积也不会改变。
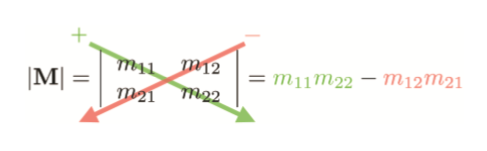
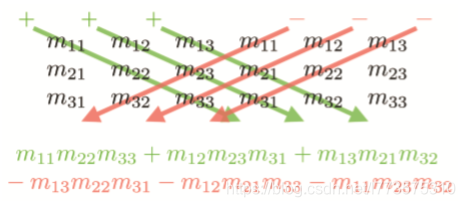
矩阵的行列式
在任意方阵都存在一个标量,称为该方阵的行列式。
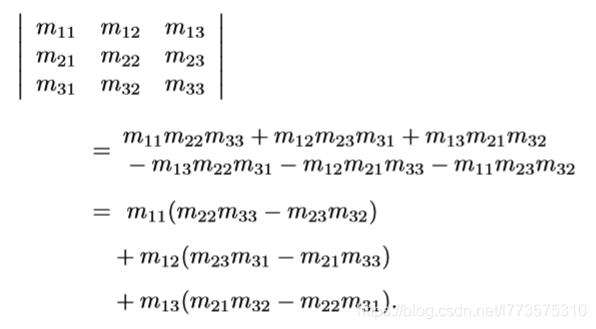
如果方阵三行解释为三个向量,就等价于(a×b)·c。

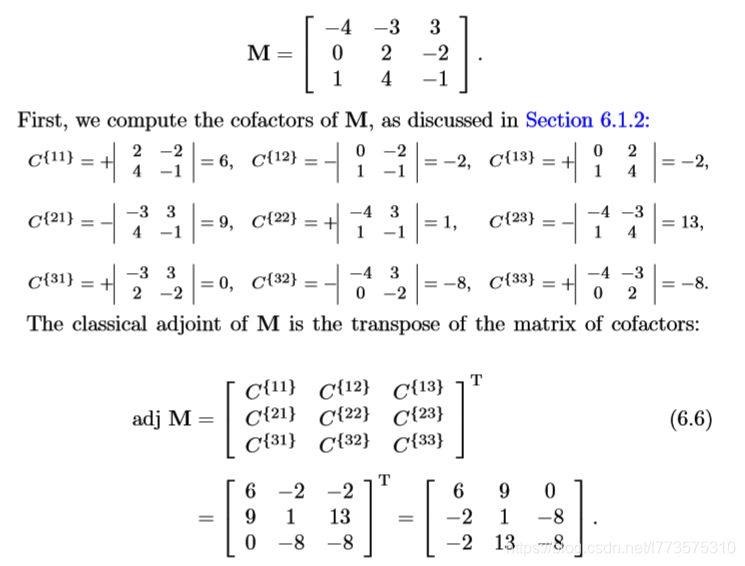
余子式
矩阵M{ i j }表示从M除去第 i 行和第 j 列剩下的矩阵,称作M的余子式。

代数余子式
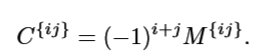
用代数余子式计算方阵的行列式:

行列式性质
- |AB| =|A||B| (可扩展到多个矩阵)
- |MT| = |M|
- 矩阵任意行或列为0,行列等于0。
- 交换任意两行或两列,行列式变负。
- 任意行或列加到另一行或列不会改变行列式的值。
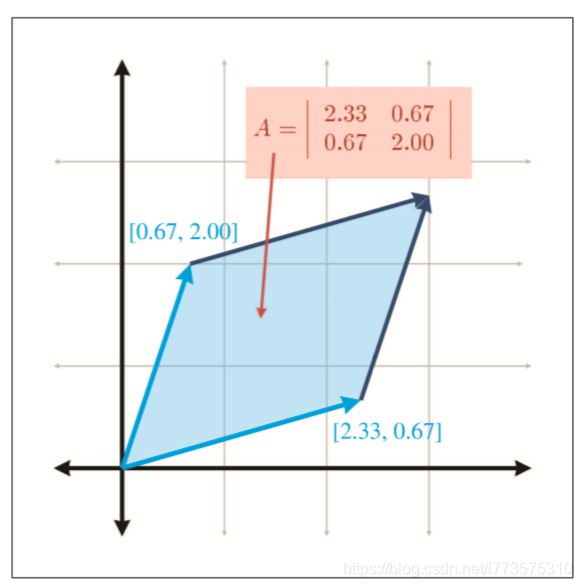
几何解释
-
在2D中,行列式等于以基向量为两边的平行四边形的又符号面积。在3D中,变换由里往外翻时行列式变负。
-
如果行列式为0,则该矩阵包含投影。
-
如果行列式为负,则该矩阵包含镜像。
矩阵的逆
- M(M-1) = M-1M = I (单位矩阵)
方阵,不是所有矩阵都有逆(如某一行全为0),有逆矩阵的矩阵称为可逆或非奇异矩阵,否则为不可逆或奇异矩阵。因为奇异矩阵行列式为0,而非奇异矩阵行列式不为0,所以对任意可逆矩阵M,仅当v=0时,vM = 0。
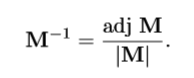
标准伴随矩阵 (adj M)
定义:为M的代数余子式矩阵的转置矩阵。
计算逆矩阵公式:
例子:

性质
- 非奇异矩阵M,(M-1)-1 = M。
- I-1 = I
- (MT)-1 = (M-1)T
- (AB)-1 = A-1B-1 可扩展多个矩阵。
几何解释
可以计算“反向”或“相反”变换,模拟“撤销”操作。

正交矩阵
定义:若方阵是正交的,当且仅当M和其转置MT的乘积等于单位矩阵。


旋转和镜像都是正交的。因为转置矩阵和逆矩阵,所以可以避免计算逆矩阵。
几何解释
正交矩阵满足下列条件:
- 矩阵的每一行都是单位向量。
- 矩阵的所有行互相垂直。
- 如果M是正交的,则MT也是正交的。
- 仅在预先知道矩阵是正交的情况下能利用正交性的优点。否则检测正交性经常是浪费时间的。
- 一组向量互相垂直,称正交基(orthogonal basis)。互相垂直且都是单位向量,称标准正交基向量(orthonoamal basis vectors)。
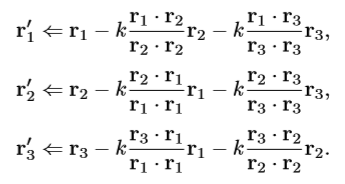
矩阵正交化
使一些有坏数据或浮点运算累计错误的矩阵正交化,以满足正交性。
施密特正交化:对每一行,减去他平行与已处理部分,最后得到垂直向量,但每次计算只是更正交化,而不是完全正交,所以可以适当的迭代多次得到标准正交基。
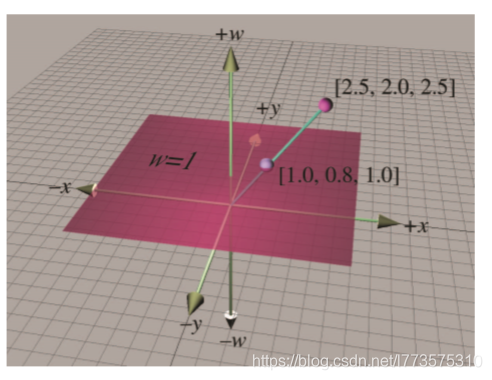
4X4齐次矩阵
即多一个分量w,称齐次坐标。可以更实现更多变换如平移、仿射、透视等。w为0或1,w=0时,表示无穷远的点。
可以三维向四维的映射。下图是二维xy向三维xyw的映射。
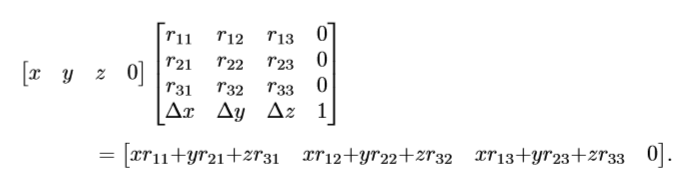
4X4平移矩阵
实际就是4D空间中的切变来实现3D中的平移。

经过向量经过旋转和平移:
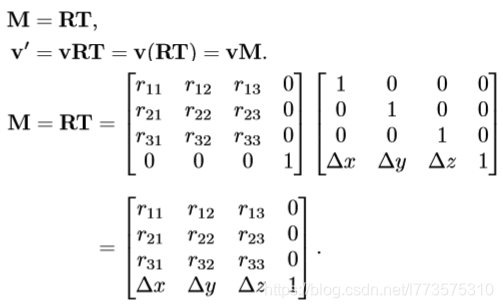
如果向量w值为0,则平移不会影响其转换后结果,可以当作“方向”,w为1,可以当做“位置”。下图w为0,可以看到最后结果不受平移影响。
仿射变换
原理是先把变换的“中心点”§平移(T)点到原点,进行线性变换®,再平移(T-1)回去,即:TRT-1。

复合变换
约定先进行缩放变换,然后进行旋转,最后平移。

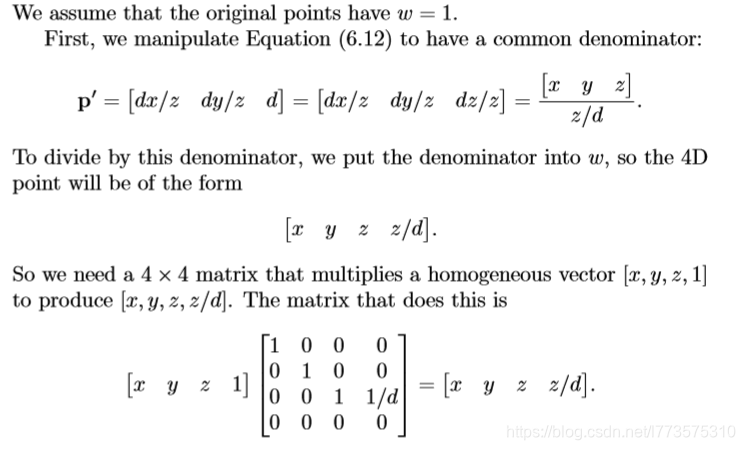
透视投影
w作为投影平面。
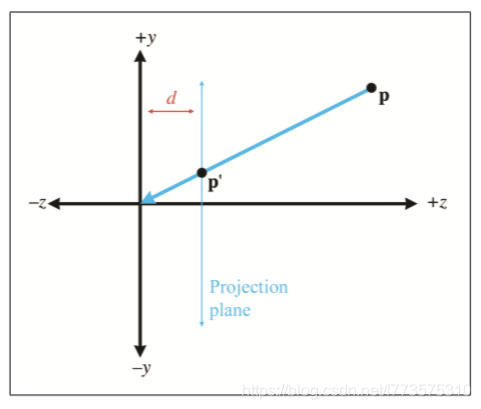

推导到3D空间中:

















 5898
5898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









