







 本项目基于ORB_SLAM3,实现了RGBD稠密地图的回环检测与优化,相较于之前的版本,代码质量有所提升,适用于机器人定位与地图构建场景。提供了TUM数据集的对比地图,展示了回环前后的效果,以及使用KinectV2的实际运行结果。
本项目基于ORB_SLAM3,实现了RGBD稠密地图的回环检测与优化,相较于之前的版本,代码质量有所提升,适用于机器人定位与地图构建场景。提供了TUM数据集的对比地图,展示了回环前后的效果,以及使用KinectV2的实际运行结果。
3版本的rgbd稠密地图可回环来了
GitHub - electech6/ORB_SLAM3_detailed_comments at dense_map_new
后面会持续更新,会增加双目稠密地图与多地图系统,只能工作之余写代码,可能还有点糙,但是比2的代码写的会好一些
以下为2的版本
------------------------------------------------------------------------------------------------------------------------------
高博曾经在他的github上提供过,但因为大佬时间少,并没有将回环加入到稠密地图,现提供一个可回环的稠密地图版本
https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP.git
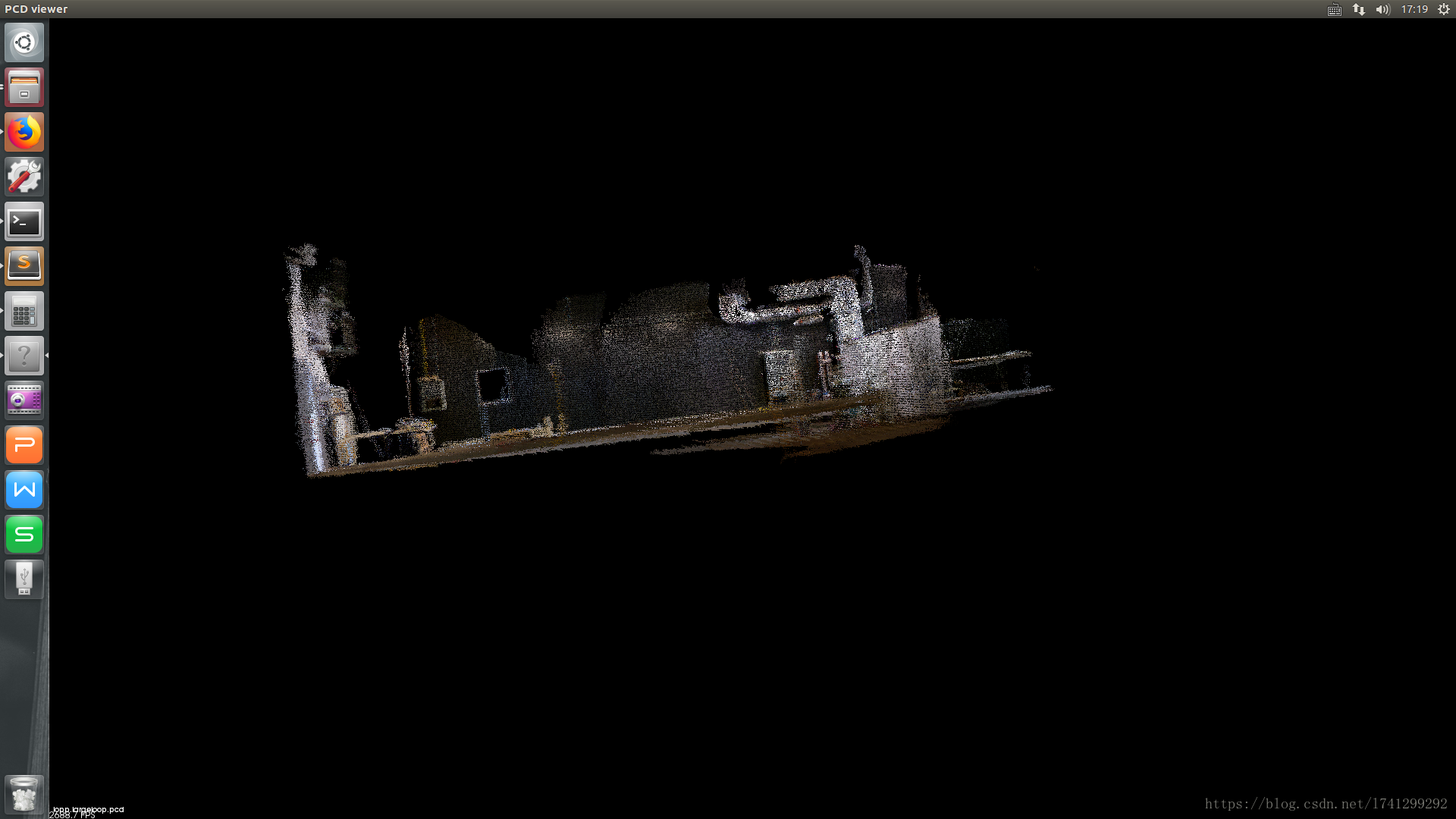
第一张图片是TUM数据集未回环的地图
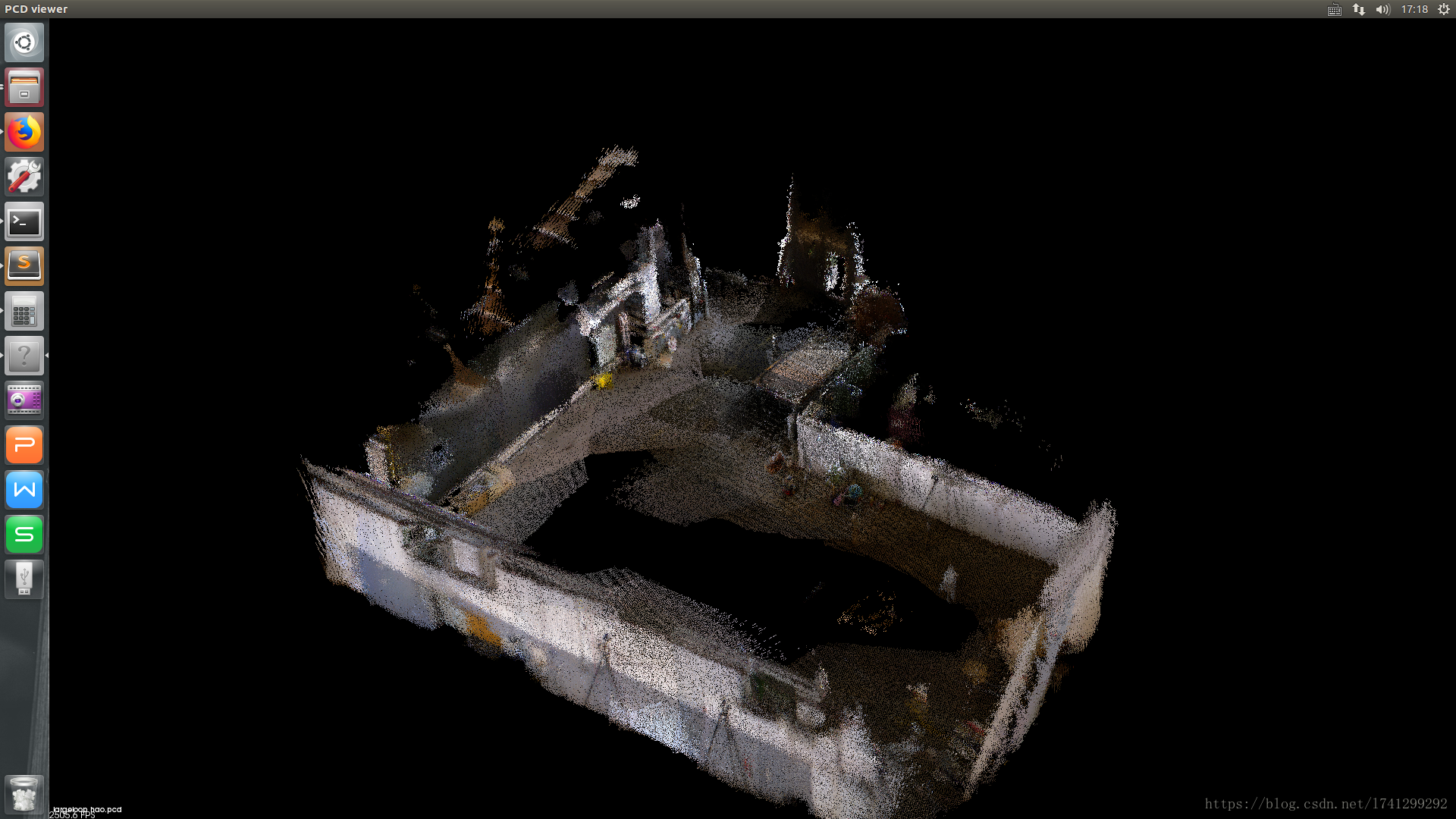
第二张图片是经过回环的地图
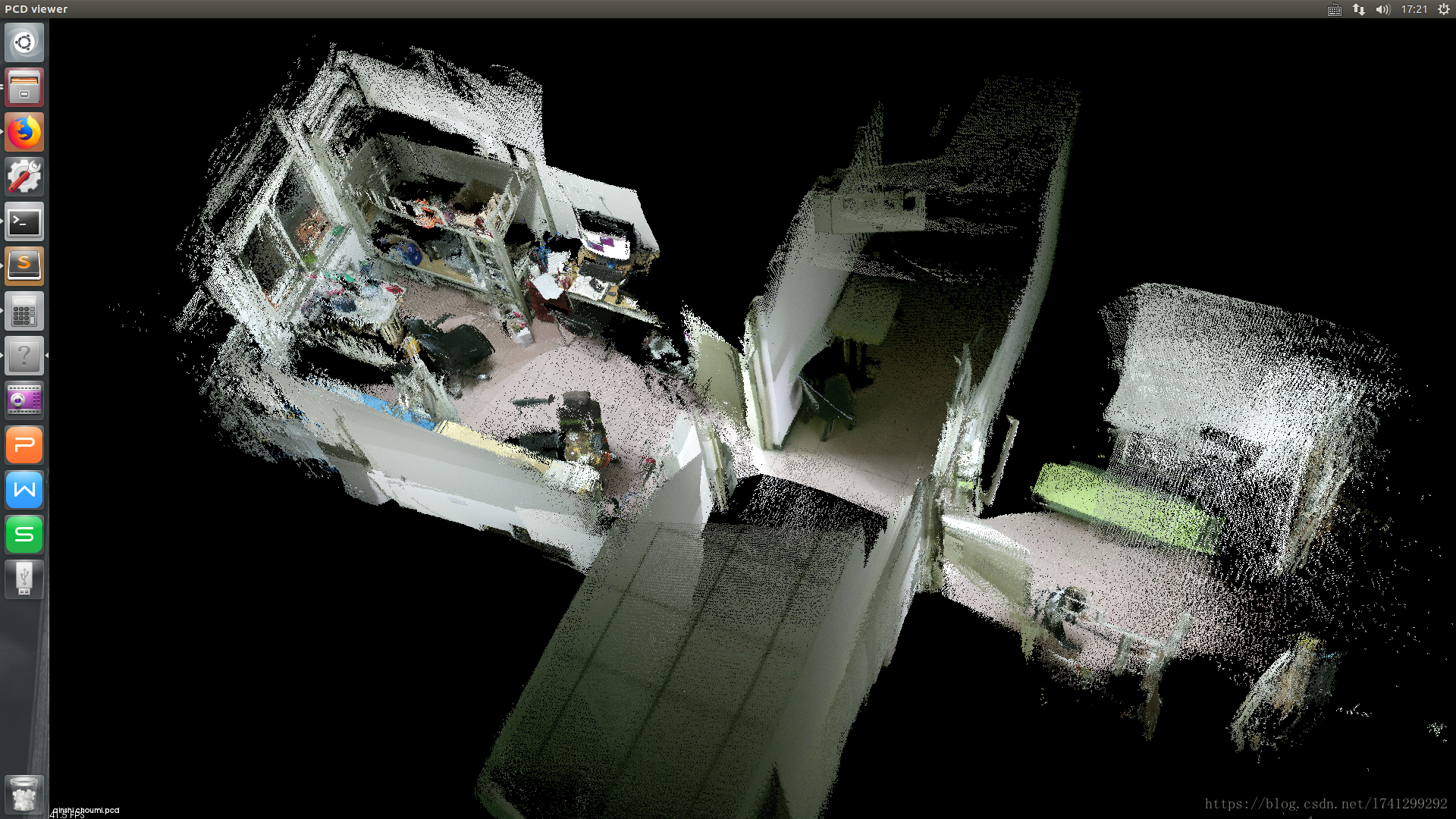
第三张是博主自己用Kinect V2跑出的地图
望能帮到各位

















 2854
2854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









