



微创直肠手术:腹腔镜检查、机器人技术和经肛门入路
1 | 引言
直肠癌的治疗方式正在不断演变。近年来,直肠癌治疗的一些变化主要集中在多学科治疗的顺序上,包括在手术前联合应用新辅助放疗和新辅助化疗的完全新辅助治疗。1,2 此外,直肠癌中的过度治疗概念促使人们开展对选择性放疗以及直肠癌非手术治疗的研究。3‐5 这些不同方法在直肠癌管理中的整合使医生能够实施更加个性化的治疗方案,而非采用笼统的通用策略。这种个性化治疗的理念同样贯穿于外科切除的策略之中。
随着直肠癌全直肠系膜切除术(TME)的发展和实施,微创外科技术的持续进步推动了该技术在直肠癌患者接受直肠切除术中的应用。
针对直肠癌使用微创手术(MIS)的情况,已有多项国内外随机对照试验进行研究。6 – 9 这些试验表明,与开放手术相比,微创手术治疗直肠癌在无病生存期和总生存期方面具有相似的肿瘤学结果。‐自由生存期和总生存期。
机器人辅助腹腔镜技术‐的引入为直肠癌的外科治疗提供了另一种选择。许多回顾性研究已证实了该技术的有效性。10 – 12 目前仅有一项比较腹腔镜与机器人辅助腹腔镜直肠切除术的随机对照试验。该研究旨在确定机器人辅助腹腔镜手术相比标准腹腔镜是否具有更低的中转开放手术率。在这项主要结局指标上,两种微创技术之间未发现差异。13
除了机器人辅助手术的引入外,其他替代技术方法也逐渐受到关注,包括腹腔镜经肛全直肠系膜切除术。该特定技术的学习曲线较陡峭,并带来了一些独特的潜在并发症。由于该技术存在一些相关挑战,这为直肠手术新技术的培训理念提供了一个独特的机会。14,15
尽管目前直肠癌外科切除的技术方法多种多样,但手术的关键步骤仍需保持不变。这些关键步骤的执行顺序可能有所不同,但无论顺序如何,这些步骤本身是恒定的。本文将概述直肠癌微创直肠切除术的关键步骤,重点介绍机器人辅助腹腔镜手术。同时将回顾维持肿瘤外科原则的技术方法和策略。此外,还将强调向下一代直肠癌外科医生传授这些手术技术的策略。
2 | 患者选择
虽然与技术无直接关联,但为微创手术选择合适的患者对于确保成功至关重要。在为微创手术选择患者时,需考虑一些普遍标准。在择期手术的情况下,相对禁忌证较少,例如肥胖和广泛的既往手术史。除了身体特征外,还存在相对的肿瘤学禁忌证。具体而言,T4期直肠肿瘤患者以及需要超出TME范围切除的患者需特别考虑。尽管已开展了大量随机对照试验来探讨微创手术在直肠癌外科治疗中的作用,但这些试验排除了T4期肿瘤及需要超出TME范围切除的患者。6 ‐ 9 因此,尽管有文献报道了这些特定人群的单中心回顾性经验和结果,但仍需谨慎对待,此类手术仍应视为实验性。肿瘤外科原则,包括阴性切缘切除,绝不能妥协,而在需要扩大或联合脏器切除的肿瘤中,这一风险显著增加。因此,这类更为激进的微创手术不应被视为标准治疗。
3 | 手术设置
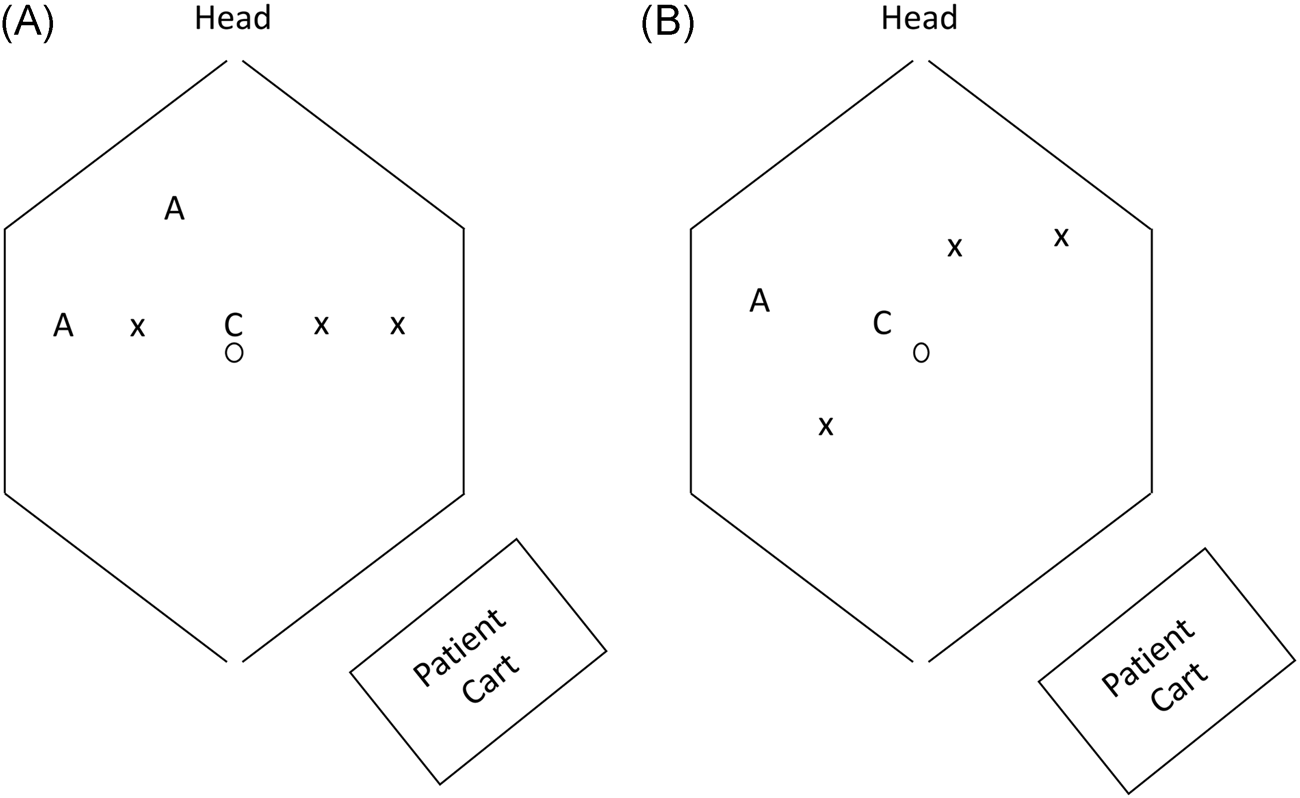
对于机器人辅助直肠切除术‐,患者取截石位。必须确保腿部正确摆放和进行腿部垫护,以提供机器人手臂足够的操作通路并避免损伤。此外,双臂内收并仔细垫护。这使得助手能够靠近床边操作,并为机器人对接留出空间。与任何需要内收手臂的手术一样,必须确保患者固定稳妥,并在消毒铺巾前确认静脉通路和动脉导管功能正常。随后将机器人患者推车从患者左髋部上方移入(图 1A,B)。此位置可旋转机械臂吊杆,以便在双对接方法中对盆腔和脾曲实现良好的通路。或者,在单对接方法中,该位置为多象限手术提供了最大的灵活性。设备塔置于患者左肩外侧。
在选择器械时,有多种可选方案有助于实施手术。常规配置的基本器械包括单极剪刀、带孔双极抓钳和ProGrasp牵引器。这些器械能够提供足够的灵活性,以完成机器人直肠切除术的各个步骤。替代选择包括马里兰双极钳和上翘式带孔抓钳。在大多数情况下,还将使用血管闭合装置进行切断操作。
肠系膜,在进行肿瘤特异性直肠系膜切除时,协助脾曲游离和直肠系膜切断。使用机器人吻合器在需要于低位盆腔进行切断的直肠切除术中具有优势。机器人吻合器确实需要一个较大穿刺孔(12毫米),该穿刺孔配有8毫米转换帽,以便在使用吻合器前继续保证器械灵活性。
4 | 手术步骤
4.1 | 腹腔通路/穿刺孔放置
穿刺孔放置是任何微创手术的关键步骤。机器人直肠切除术的穿刺孔设置有多种选择。然而,本文介绍的方法包括两种基本的穿刺孔设置,以适用于单次对接和双次对接的方式。第一种方法为机器人手臂提供了高度一致的布局,既能最大限度减少碰撞,又能优化对盆腔和脾曲的通路(图‐1A‐)。该基本布局将穿刺孔排列在脐部稍上方的一条水平线上。镜头穿刺孔置于脐部上方。另外两个机器人穿刺孔分别置于左侧锁骨中线和左侧腋前线。最后一个机器人穿刺孔置于右侧锁骨中线,若使用吻合器,则此处作为吻合器穿刺孔。随后可在右侧腋前线和右上腹各放置一个助手穿刺孔。需要注意的是,采用此穿刺孔设置时,在旋转机械臂吊杆后需要进行第二次对接以游离脾曲。
第二种设置是一种调整,允许外科医生在机器人单次对接中完成直肠切除术和脾曲游离(图 1B)。这种穿刺孔设置可能会增加碰撞风险,并且在某些情况下,难以到达。

非常低的骨盆。此外,该设置仅有一个辅助端口,因此在肥胖患者中操作可能更困难,因为在这些患者中床旁协助对于暴露更为关键。该设置涉及将摄像头置于脐部右侧更外侧和更上方的位置。右侧机器人端口放置在右下象限,另外两个左侧端口分别位于上腹部和左上象限。辅助端口放置在右上象限。这种将通路倾斜,使端口从右下象限延伸至左上象限的布局,提供了对左半腹的扩展通路。采用此技术,可在不重新对接机器人的情况下完成直肠切除术和脾曲游离。
4.2 | 淋巴血管解剖
淋巴结清扫仍是评估结直肠癌手术效果的质量指标。关于为获得肿瘤学获益而进行的近端解剖范围,目前仍存在争议。具体而言,在左结肠动脉发出点上方对肠系膜下动脉(IMA)进行高位结扎具有两个目的:第一是切除可能存在风险的淋巴结;第二点可能更为重要,即为重建提供足够的结肠长度。肠系膜附着是限制结肠到达低位盆腔以完成吻合术的主要因素。对于近端IMA的处理有多种方式,包括单纯离断、在保留左结肠动脉升支的同时切除淋巴组织,以及类似地切除淋巴结但保留中央血管弓。16
无论采用何种方法处理近端肠系膜下动脉,都有几个重要的技术要点需要注意。首先,在骶骨岬水平进入结肠系膜与腹膜后之间的间隙时,必须尽早识别输尿管,以确认已到达正确的解剖层面。进一步向侧方解剖可显露生殖血管。一旦识别出输尿管,解剖即沿上痔动脉向肠系膜下动脉起始部近端方向继续进行。IMA前表面无解剖上的动脉分支,因此可以安全地对腹侧表面的淋巴组织进行解剖和清除。暴露腹侧表面后,可对动脉进行环周解剖。腹下神经走行于腹膜后的肠系膜下动脉外侧,在接近其起始部时,腹下神经内侧存在一个间隙,可通过该间隙分离并切断IMA,同时避免损伤相关的神经结构(图2)。
血管控制与离断的技术因人而异。然而,我们的做法是在夹子之间进行切断,而不是使用血管闭合装置进行离断。
血管离断后,主刀医生可以更清楚地观察神经,并将其从肠系膜中解剖游离出来(图2)。该部分解剖操作可通过在肠系膜下静脉(IMV)下方、格罗塔筋膜前表面建立间隙来辅助完成。此过程有助于明确淋巴管和肠系膜下动脉(IMA)从腹膜后过渡至结肠系膜平面的区域。最后,离断IMV,通常使用血管闭合装置完成。需要注意的是,为实现完整的游离。
弯曲和结肠系膜,最好在胰腺下缘附近以及脾曲的IMV分支近端分离并切断静脉。
4.3 | 结肠游离
任何结肠和直肠手术的关键在于为重建提供足够的长度。此外,游离降结肠和乙状结肠是进入盆腔左侧的重要步骤。这还能使结肠和直肠被拉出盆腔,从而安全地进行直肠切除术中的全直肠系膜切除平面解剖。与其他用于结肠手术的微创外科技术一样,机器人解剖首先从内侧到外侧进行,将所有结肠系膜从腹膜后向上、向外提起至腹壁,并向胰腺方向分离。在结肠系膜下方进行的解剖越多,从外侧入路完成游离就越容易。乙状结肠外侧的任何附着组织均采用锐性分离和电凝结合的方式予以切断。此操作沿降结肠尽可能向上延伸至脾曲。
4.4 | 直肠系膜切除
全直肠系膜切除平面的解剖是直肠癌手术的核心。在骶骨岬水平正确地进入正确的解剖平面,有助于顺利完成手术的这一关键步骤。该位置的疏松结缔组织较易辨认。然而,一旦开始解剖,必须注意沿该疏松结缔组织的前表面向直肠系膜筋膜方向进行,以避免常见错误——误入骶前软组织,从而导致出血。首先在后方平面进行解剖,有助于更清晰地界定侧方部分。

直肠系膜切除术。此时,使用ProGrasp牵引器将远端乙状结肠向上提起紧贴腹壁。然后使用带孔双极电凝在直肠系膜平面产生牵拉力。具体操作是将带孔双极电凝形成一个直角“L形”(图3)。这样可形成较大的钝性接触面,将直肠系膜向前抬起,同时产生一定的牵拉力,将直肠系膜从盆腔中向上提起。然后使用电剪在后方平面进行尽可能远端的解剖。
在解剖完盆腔后上方区域后,使用电凝切断侧方附着组织。全直肠系膜切除解剖的其余部分需要助手将直肠向上并拉出盆腔以协助操作。为便于操作并防止滑脱,我们使用Raytec纱布围绕上段直肠进行结扎,以尽量减少对直肠系膜和肠管的损伤,同时允许床旁助手使用锁扣式抓钳夹持Raytec纱布。实施全直肠系膜切除的关键原则是能够将直肠向上并拉出盆腔,这一点无论是开腹直肠切除术还是微创手术均保持不变。实现这一目标的唯一方法是从环周方向开始操作。
通过在前方切开腹膜反折,可以更清楚地观察到如何将两侧的后方解剖与前方连接。这还将有助于更好地暴露盆腔,因为直肠和直肠系膜将开始变得可移动,并可被牵拉出盆腔。在此部分解剖过程中,可使用prograsp向前牵拉,提起精囊上方的腹膜,或向前牵拉子宫。同时,助手可将直肠从盆腔中牵拉出,并通过前侧或外侧牵拉提供额外的暴露。使用带孔双极电凝继续钝性操作直肠系膜,以产生牵引力,沿直肠系膜筋膜向下解剖至盆底。
对于真正意义上的全直肠系膜切除解剖,必须在后方切断瓦尔代耶筋膜,以暴露裸露的直肠,并为吻合器的适当应用创造条件。如果对肿瘤位置有任何疑问,应在应用吻合器之前通过内镜定位肿瘤,以确保足够的远端切缘。然后将机器人吻合器从前方向后方放置,用于靠近盆底的切断。通常需要两次击发吻合器才能完成切断。据经验,即使使用60毫米吻合器,这一情况仍然存在。
4.5 | 脾曲游离
对于所有直肠手术(少数例外情况外),脾曲游离应被视为手术的标准步骤。这可以确保吻合术在无张力的情况下进行,通常还能使用更近端的乙状结肠或降结肠进行吻合。与淋巴血管解剖类似,脾曲游离有多种方法,熟悉每种方法有助于应对较难处理的脾曲,并提供更多选择。在传统穿刺孔布局(图 1A)中,需将机器人手臂解除对接并旋转机械臂吊杆,患者调整为反向特伦德伦堡位,利用重力辅助结肠牵拉。随后机器人重新对接,摄像头保持原位置不变,电剪通常置于患者左侧的锁骨中线穿刺孔,ProGrasp器械保留在最左侧穿刺孔,带孔双极电凝则置于右侧锁骨中线穿刺孔。而在单次对接法中,脾曲游离使用带孔双极电凝配合电剪或血管闭合装置完成。在此设置下,ProGrasp仅用于将结肠向盆腔方向牵拉,助手则协助操纵结肠。
主要方法包括结肠下入路和经横结肠前入路。经横结肠前入路与开放手术技术中的游离方式最为相似。将大网膜抬起并从横结肠上分离,以进入小网膜囊,然后向外侧延伸至脾曲。接着进入先前的结肠外侧游离平面,使用电凝或血管闭合装置,从胰腺下缘开始切断横结肠系膜的附着,继续向内侧直至肠系膜下静脉残端。
结肠下入路的独特之处在于,它仅用于脾曲游离的微创技术。在离断肠系膜下静脉后,使用电凝将结肠系膜从胰腺下缘分离。解剖继续向内侧越过胰腺并进入小网膜囊(图4A)。然后可使用血管闭合装置离断结肠系膜与胰腺下缘的附着部分,并向外延伸至脾结肠韧带。此过程通常还需床旁助手协助,抬起结肠系膜,暴露结肠系膜下方的侧方游离平面(图4B)。一旦这些附着结构全部被离断,再将大网膜从横结肠上翻起,以完成脾曲游离。
4.6 | 标本取出与吻合术
完成盆腔解剖、结肠游离及脾曲游离后,使用血管闭合装置离断肠系膜。通常将肠系膜下动脉残端和肠系膜下静脉包含在标本中,并向结肠方向继续分离至预定吻合术位置。随后做Pfannenstiel切口以取出标本并准备行吻合术。放置切口保护器后取出标本,从直肠闭合端开始取出标本最为方便。确认具有足够长度用于吻合术后,离断近端结肠。通过肉眼观察到的搏动性出血、多普勒可闻信号或在边缘动脉处可触及的搏动来确认搏动性血流。
标本取出后应送至病理学部门进行直肠系膜完整性的大体检查以及切缘评估。吻合术使用端对端吻合器完成。吻合钉砧帽通过荷包缝线固定于近端结肠。随后通过闭合切口保护器重新建立气腹。将吻合器经直肠插入,使钉杆从缝钉线外侧穿出,理想位置应靠近机器人吻合器两次击发交界处。连接并关闭吻合钉砧帽。必须确保结肠仍处于正确方向且无扭转。击发吻合器后将其退出。检查吻合环组织是否完整。闭塞近端结肠,向盆腔注入生理盐水。内镜下观察吻合口,并进行充气以实施漏气试验。
5 | 教育原则
机器人手术教学可能比其他一些微创技术更具挑战性。这在很大程度上是由于机器人手术中存在的空间差异。换句话说,主刀医生并不在手术台旁。对于一些外科医生和受训者来说,这可能被视为培训的障碍。这些障碍可以通过手术室内的额外协助来克服,例如配备一名床旁助手。此外,双控制台的可用性也可以增强教学体验。这些条件并非必需,在缺乏这些资源的情况下也能实现高质量的培训和教学,但这需要带教老师投入更多的精力。
了解手术步骤及其作用以及复杂程度,为开展外科学教育提供了一个良好的框架。这一点在其他外科手术中已得到证实。17,18 明确的学习目标能够提升所有教学体验的质量。对于机器人辅助腹腔镜直肠切除术而言,与外科住院医师共同根据各个手术步骤来确定每例手术的培训目标,将带来互利的效果。对于机器人直肠切除术而言,最简单的步骤是降结肠和乙状结肠的游离。该步骤可使外科住院医师熟悉器械的运动方式,并掌握通过操作器械腕部进行钝性但主动的牵拉以实现暴露的概念。脾曲游离对学习者也有类似的好处。此步骤难度有所增加,但有助于学习者进一步增强对器械操作、暴露和技巧的信心。
在熟练掌握这些步骤的操作后,外科受训者即可进入肠系膜下动脉的淋巴血管解剖以及盆腔内的全直肠系膜切除解剖。这些步骤要求具备机器人器械操作的基本概念,以确保安全高效地完成。当然,最简单的起始方法是直接计划在肠系膜下动脉起始处附近将其离断。这种方法虽然最不复杂,但仍需要熟练的器械操作技巧和精细的解剖,以避免神经血管损伤。显然,保留左结肠动脉升支或保留中央血管弓的技术难度更高,但可作为额外的培训机会加以利用。
最后,全直肠系膜切除解剖虽然看似简单,但在直接影响局部复发风险方面具有最重要的肿瘤学意义。学员必须识别解剖平面,并能够在不损伤直肠系膜筋膜的情况下操作直肠系膜以实现暴露。这将最终获得一个完整直肠系膜标本。这与最佳的肿瘤学结果相关。鉴于此步骤的重要性,学员应在进行该步骤前,先展示出对其他技能的掌握能力。后方解剖最为直接,可在进行前方和侧方解剖之前,帮助获得正确的解剖平面操作经验。
向外科住院医师概述手术的这些步骤,并提供支持性材料,包括模拟训练和手术视频回顾的通路,是至关重要的。这为他们提供了实现手术操作能力的路线图,同时仍能保持手术室中安全、肿瘤学原则和效率的基本要求。当配备双控制台并有额外床旁助手时,用户之间可交换器械,从而创造了宝贵的机会。从培训角度来看,这是极为宝贵的,因为住院医师可以反复练习并演示机械臂位置、器械操作、牵拉、暴露和层面识别等技术。
替代的微创手术方法
无论直肠切除术采用何种技术方法,手术步骤始终保持不变。然而,这些步骤的执行顺序可能有所不同,技术方法也可能存在差异。19,20 其中最显著的例子是经肛全直肠系膜切除术(TaTME)。该技术在全直肠系膜切除解剖方面具有明显不同,其通过缝合直肠并直接在腹腔镜可视化下经肛途径进入解剖平面并离断直肠。14,21 该技术在平面可视化方面具有独特性,且需要特定的专业技能,因其不同于任何经腹入路。这为培训领域带来了一些额外的挑战。然而,鉴于这一新方法所伴随的挑战,它也为改进教育培训方法提供了极好的机会。这已成为许多国家引入该技术的一个显著特点,包括采用标准化的培训和实施方法。14,15
7 | 总结
直肠癌的直肠切除术无论采用开腹手术还是微创技术,仍然是一项具有挑战性的手术。与任何手术操作一样,经验和反复实践对成功至关重要。这不仅有助于最大限度地提高肿瘤学疗效,同时还能尽量减少潜在的并发症。熟悉机器人辅助腹腔镜直肠切除术的标准化手术步骤,有助于为下一代外科医生的培训奠定基础,从而更好地治疗直肠癌患者。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









