







主要内容
SLAM的定义
SLAM的基本框架
SLAM的定义
同时定位与地图构建。在未知环境中,同时确定机器人在环境中的位置,并且构建环境的地图。
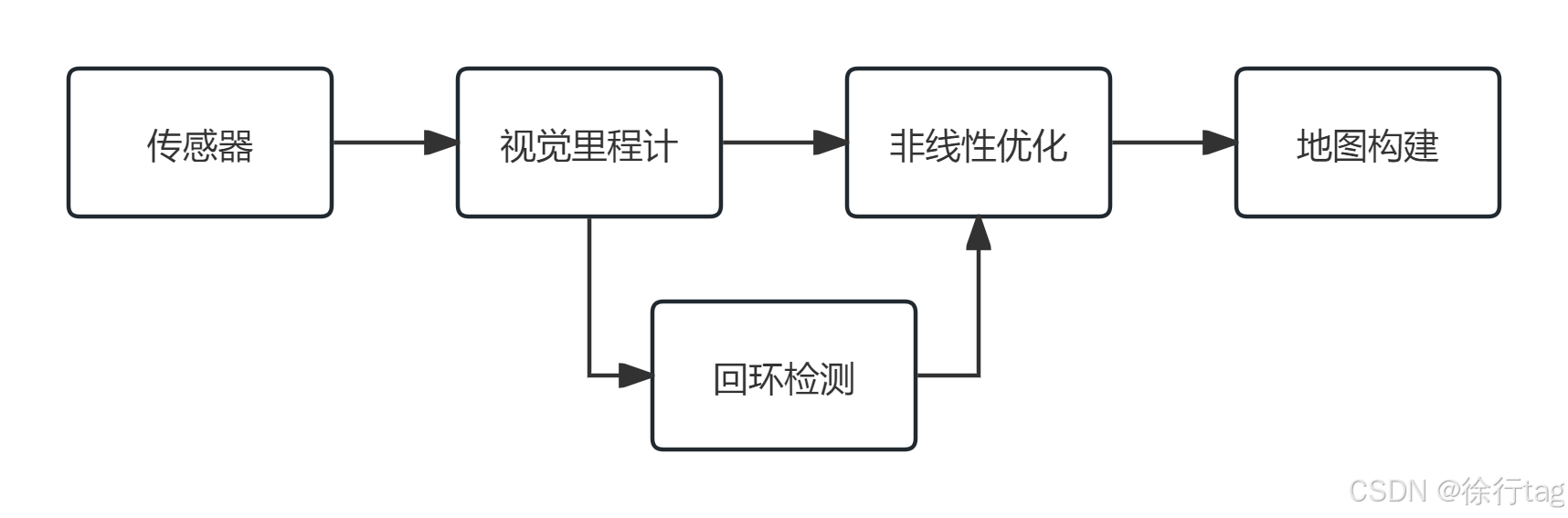
基本框架
-
传感器:读取环境信息,和自身信息。对于视觉SLAM主要是摄像机拍摄的环境的照片和控制器的指令信息(控制机器人运动,由于有噪声等误差,并不准确)。
-
视觉里程计:从传感器获取的相邻两帧的图片中获取机器人的运动信息。
-
回环检测:视觉里程计来估计轨迹,将不可避免地出现累积漂移(Accumulating Drift)。简单来说就是误差会随着机器人的运动逐渐积累。而回环检测可以检测是否回到了起点,或者曾经来过的位置。用这个信息来修正系统的误差,相当于每次回到原点都进行一次校准。从而避免误差的持续累积。

-
非线性优化:根据视觉里程计和回环检测的信息(具体什么信息,如何计算,会在之后的文章中进行详细的分析)进行计算,预测当前机器人的位置及环境建模,用于最后的地图构建。
小思考
- 如何从摄像机获取环境信息?
- 如何进行视觉里程计的分析计算?
- 如何进行回环检测?
这些问题将在本栏目的后续文章逐步进行分析,欢迎订阅这个栏目。


















 6639
6639

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











