






视觉 SLAM(Simultaneous Localization and Mapping)算法是机器人和自动驾驶领域中的关键技术,它通过相机数据同时进行定位和建图。以下是一些常用的视觉 SLAM 算法及其特点:

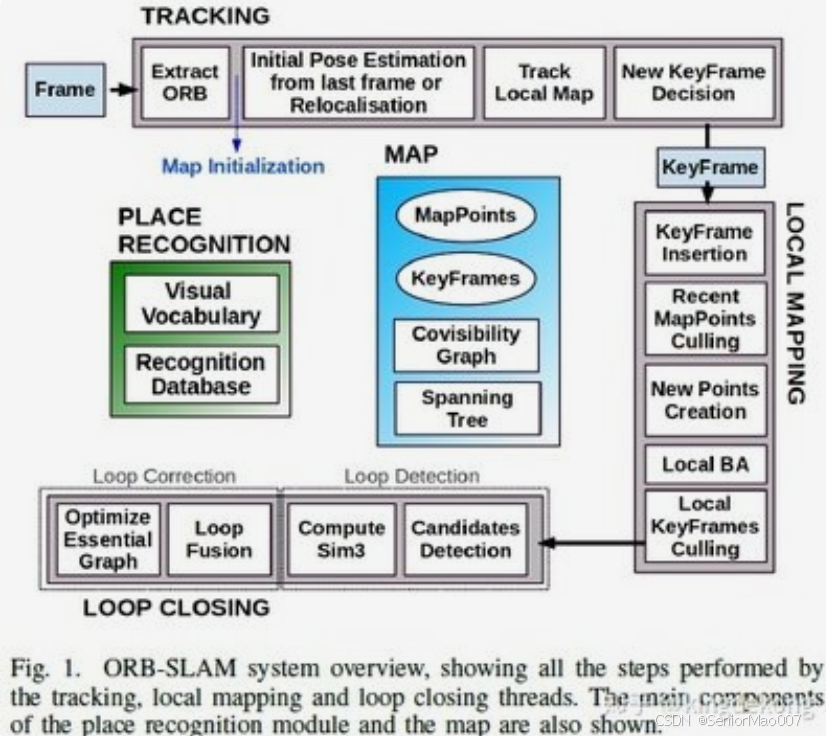
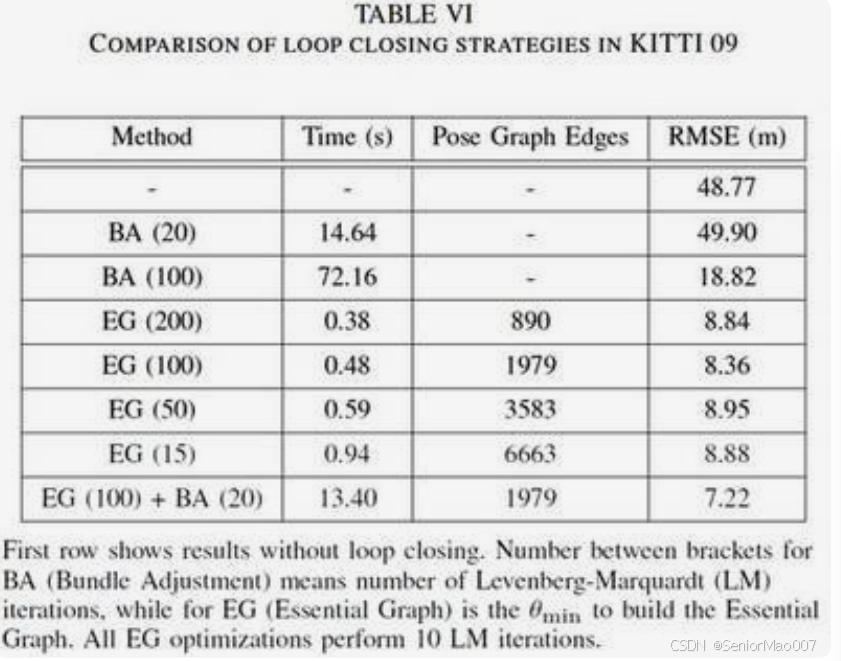
1. ORB-SLAM
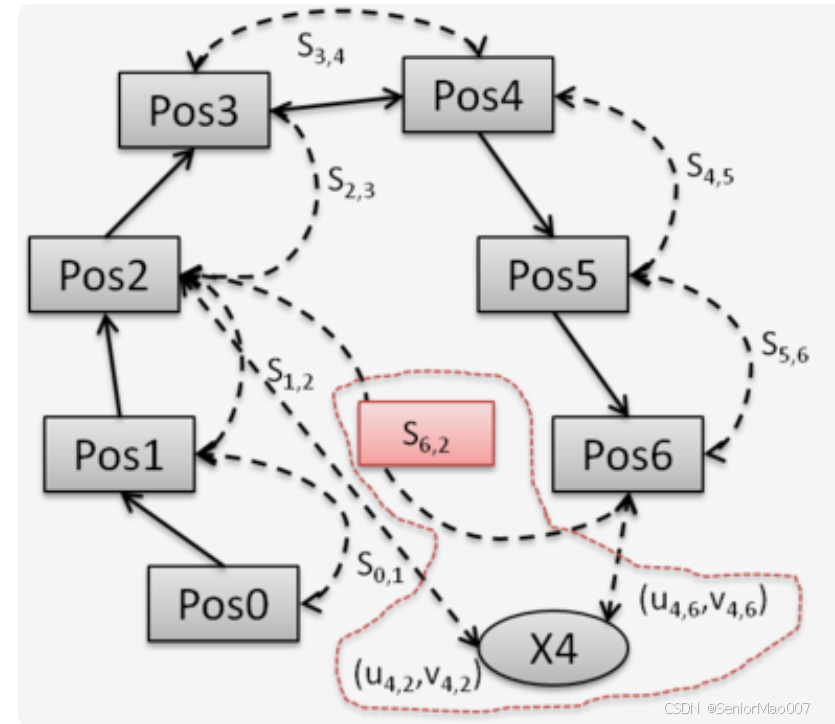
- 特点:基于特征点的 SLAM 系统,使用 ORB 特征进行关键点检测和描述符生成。适用于单目、双目和 RGB-D 相机。
- 优势:鲁棒性强,能够在多种环境下运行,包括室内和室外。
- 劣势:计算复杂度较高,对硬件有一定要求。
实现
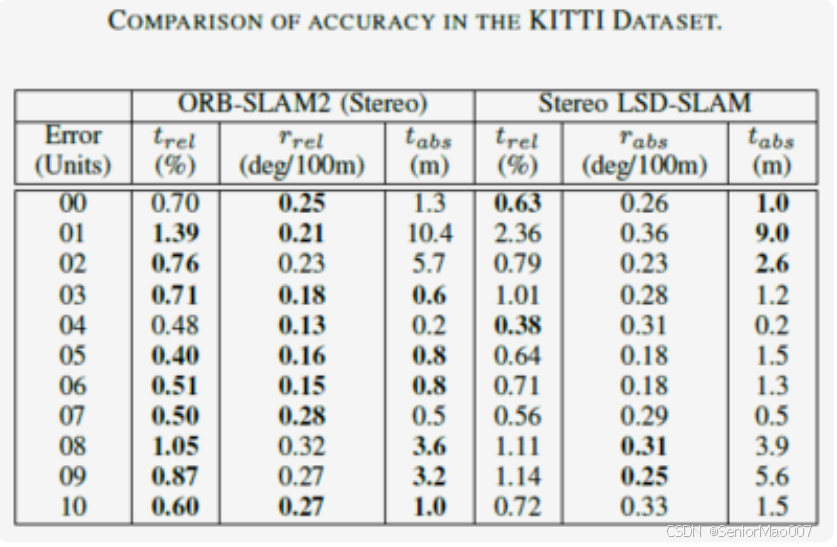
2. LSD-SLAM (Large-Scale Direct Monocular SLAM)
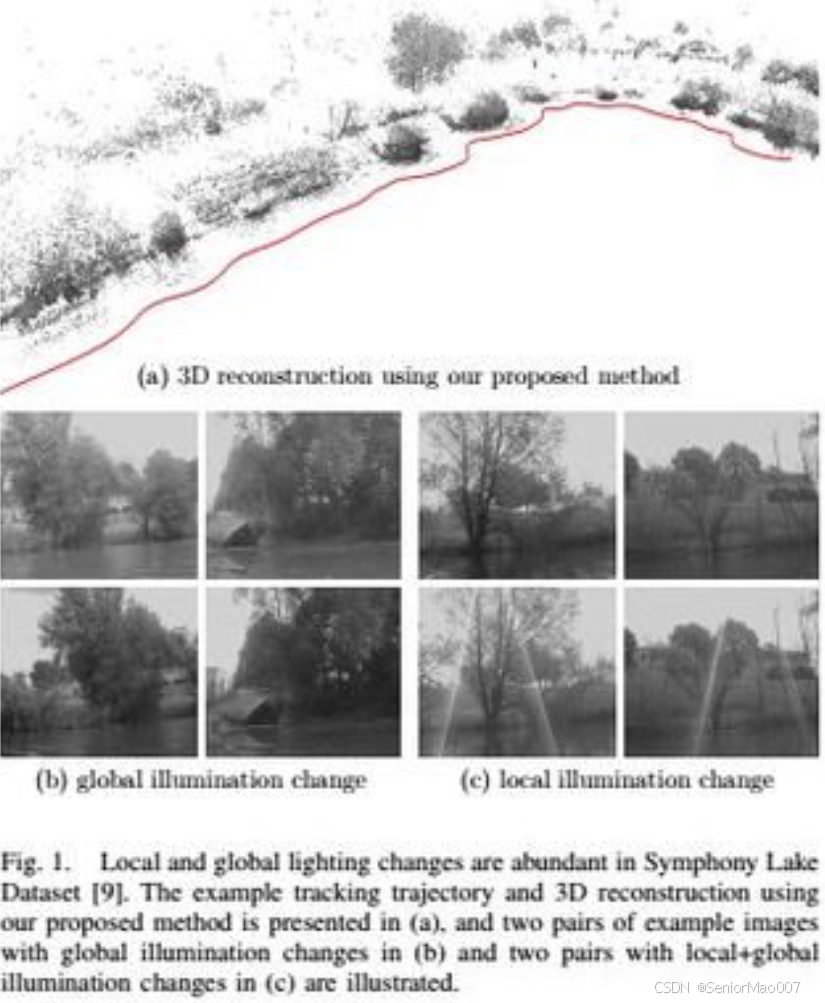
- 特点:直接法 SLAM,不依赖于特征点,而是直接使用图像像素值进行匹配和优化。
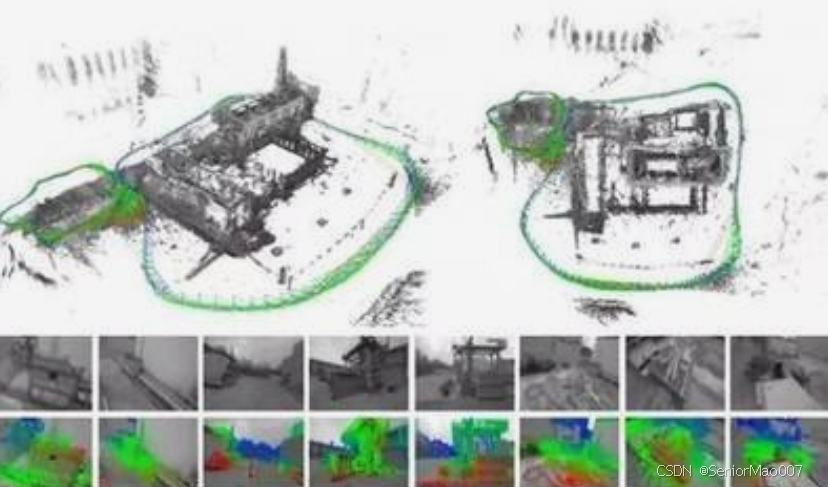
- 优势:能够生成稠密的地图,适用于需要高精度地图的场景。
- 劣势:对光照变化敏感,计算复杂度较高。

- 让机器人认路
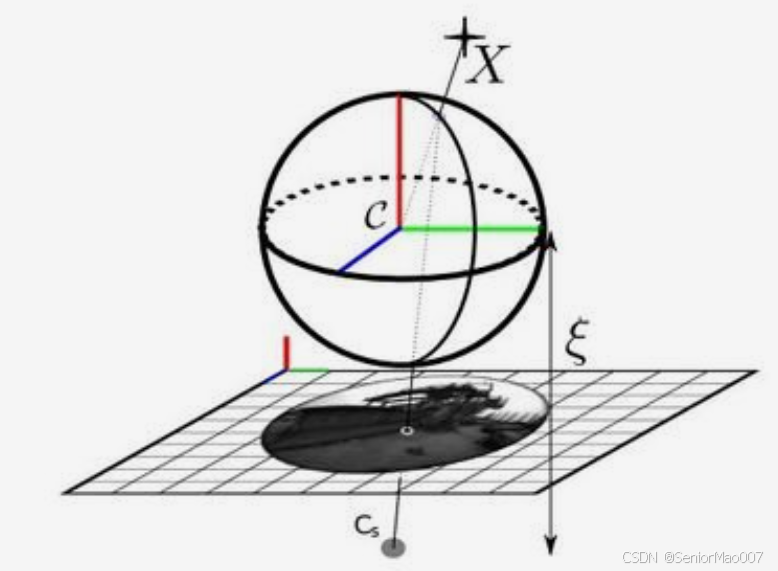
- 全向相机
实现
3. DSO (Direct Sparse Odometry)
- 特点:直接法 SLAM,采用稀疏光度误差最小化的方法进行位姿估计和地图构建。
- 优势:计算效率高,适用于实时应用。
- 劣势:对纹理较少的环境适应性较差。
实现
- 开源代码:DSO
- 论文:DSO: Direct Sparse Odometry
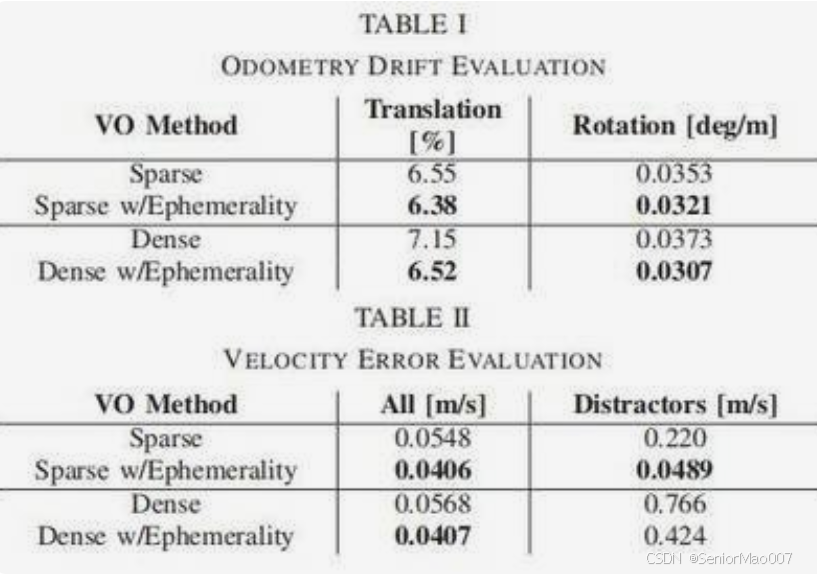
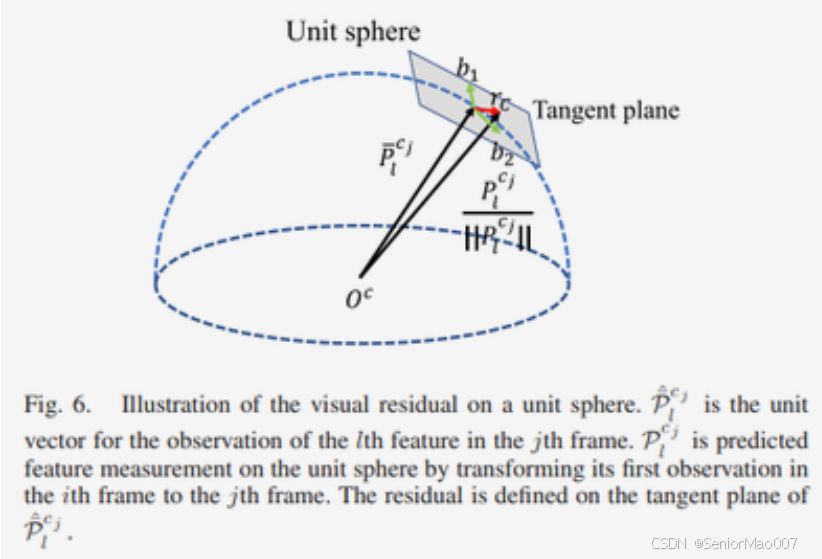
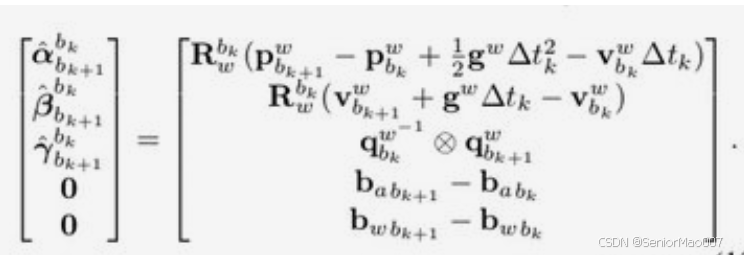
4. VINS-Mono (Visual-Inertial Navigation System for Monocular Cameras)
- 特点:结合视觉和惯性传感器(IMU)的 SLAM 系统,利用多传感器融合提高定位精度。
- 优势:在运动剧烈或光照变化较大的情况下表现良好。
- 劣势:需要额外的 IMU 传感器。
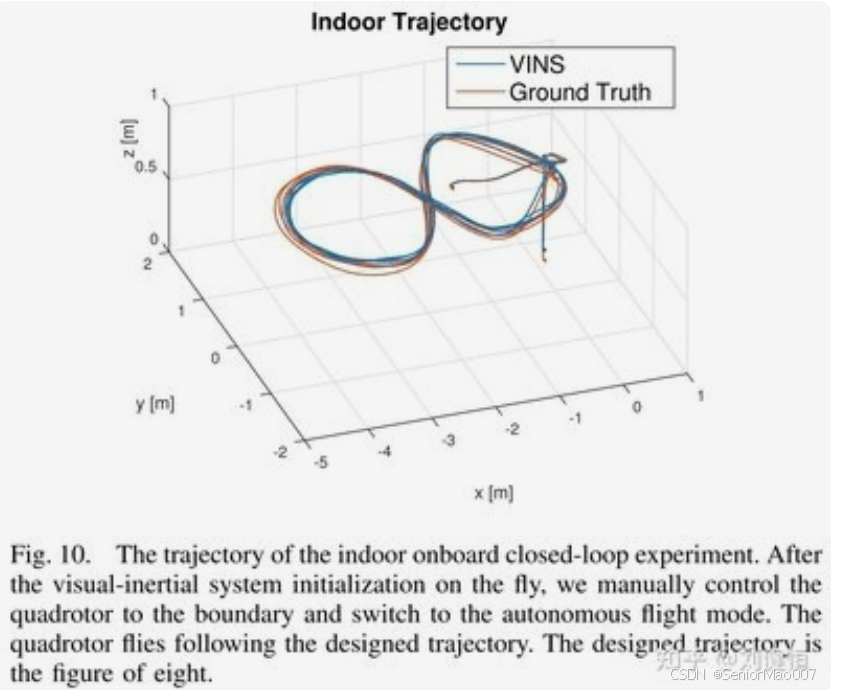
- 写“8”字

- 简单模型
- 算了一笔

- 深度相机

- 鱼眼相机
- 不管那么多,干下去就是正确的
实现
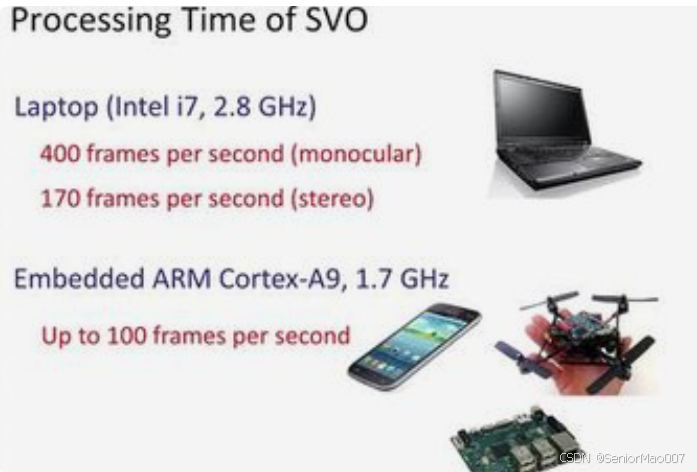
5. SVO (Semi-Direct Visual Odometry)
- 特点:半直接法 SLAM,结合了直接法和特征点法的优点,既利用了像素信息也利用了特征点信息。
- 优势:计算效率高,适用于实时应用。
- 劣势:对纹理较少的环境适应性较差。

- 看教课
- 抄程序就是正确的,没有那么多想法
实现
6. ElasticFusion
- 特点:基于 RGB-D 数据的稠密 SLAM 系统,能够生成稠密的三维地图。
- 优势:生成的地图质量高,适用于需要详细环境信息的应用。
- 劣势:计算复杂度较高,对硬件要求较高。
- 看到这,Elastic神女都给力量
- 数学模型最重要
实现
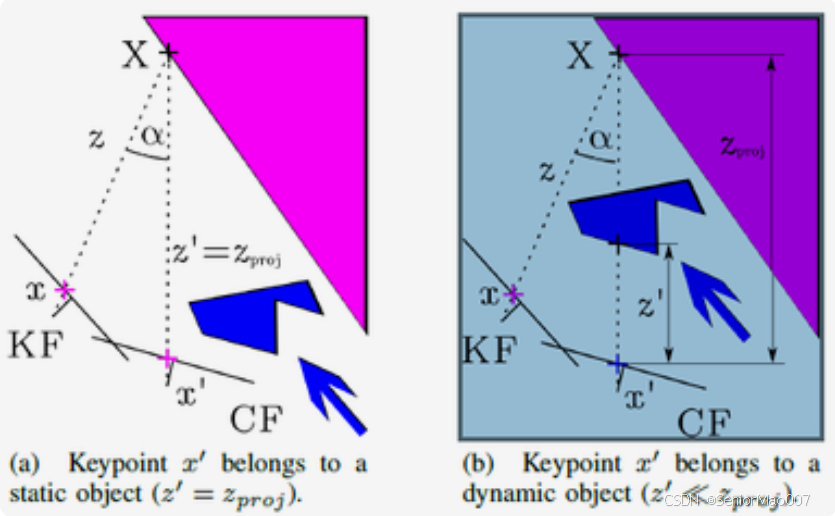
7. DynaSLAM
- 特点:动态 SLAM 系统,能够处理动态环境中的移动物体,适用于城市道路等复杂环境。
- 优势:能够在动态环境中保持较高的定位精度。
- 劣势:计算复杂度较高,对硬件有一定要求。
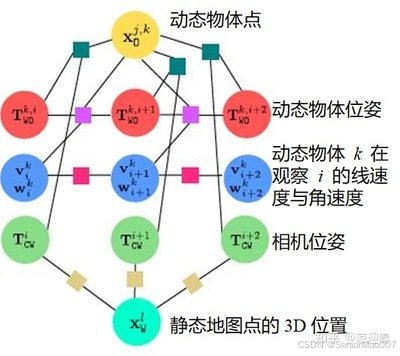
- 数学模型

实现
8. Kimera
- 特点:多层表示的 SLAM 系统,能够同时生成稀疏和稠密的地图,并支持语义分割。
- 优势:提供了丰富的地图信息,适用于需要多层级地图的应用。
- 劣势:计算复杂度较高,对硬件要求较高。
- 酷炫(英文发音类似--Kimera)
实现
总结
这些视觉 SLAM 算法各有优劣,选择合适的算法取决于具体应用场景的需求。例如,如果你需要在资源受限的设备上运行,可以选择计算效率高的 DSO 或 SVO;如果你需要生成高质量的稠密地图,可以选择 ElasticFusion 或 Kimera。

















 1705
1705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









