







 超级会员免费看
超级会员免费看
作品声明:个人观点、仅供参考

在自动驾驶的感知世界里,"位置" 是一切决策的基础 —— 无论是判断前方车辆的距离、识别车道线的偏移,还是规划避障路径,都需要将传感器采集的原始数据转化为统一坐标系下的精准坐标。作为地平线最新一代前视感知方案,Horizon Mono3.0 通过一套精密的坐标系体系,为自动驾驶的 "环境建模" 提供了关键的 "数字地图"。本文将深度拆解 Mono3.0 的坐标系设计逻辑,揭示其如何通过坐标系转换实现从图像像素到三维空间的精准映射。
一、为什么说坐标系是前视感知的 "底层基建"?
前视感知的核心任务是通过单目摄像头获取的二维图像,重建车辆周围的三维环境。这一过程中,最大的挑战是如何将二维像素点与三维空间点一一对应。而坐标系正是解决这一问题的 "翻译官"—— 它定义了不同空间的原点、轴方向和度量单位,通过数学变换将图像中的 "虚拟坐标" 转化为真实世界的 "物理坐标"。
Horizon Mono3.0 的前视感知数据模型中,涉及的核心坐标系包括:
- 车辆坐标系(Vehicle Coordinate System, VCS):以车辆自身为原点的局部坐标系,是自动驾驶决策的 "本地原点";
- 图像坐标系:分为像素坐标系(离散的图像像素位置)和物理坐标系(连续的图像平面坐标),是摄像头原始数据的 "出生地";
- 相机标定坐标系(Camera Calibration Coordinate System, CCS):存储摄像头内外参数的中间坐标系,是坐标系转换的 "校准基准";
- 世界坐标系:全局固定的绝对坐标系(如 UTM 坐标系),用于多车协同或全局定位。
这四者构成了 Mono3.0 前视感知的 "坐标系金字塔",每一层的转换都直接影响感知结果的精度。
二、从像素到车辆:Mono3.0 坐标系的逐层解密
2.1 车辆坐标系(VCS):自动驾驶的 "决策原点"
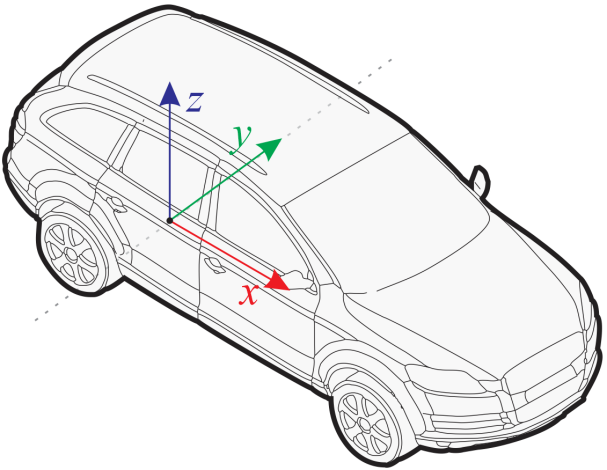
Mono3.0 的车辆坐标系(VCS)以车辆后轴中心在地面的投影为原点(Ov),定义如下:
- X 轴:指向车辆前进方向(前方为正),是纵向距离的度量基准;
- Y 轴:指向车辆左侧(左侧为正),用于横向位置的判断;
- Z 轴:垂直地面向上(上方为正),控制高度信息的感知。
这一设计的核心考量是 "以车为中心" 的决策逻辑 —— 自动驾驶的路径规划、碰撞检测等功能,均需要障碍物、车道线等目标相对于车辆的位置(如 "前方 10 米左侧 2 米处有行人")。VCS 的原点选择后轴中心,避免了因车辆上下颠簸导致的原点偏移,提升了动态场景下的稳定性。
2.2 图像坐标系:从离散像素到连续物理空间的桥梁
前视摄像头输出的原始数据是二维图像,其坐标分为两个层级:
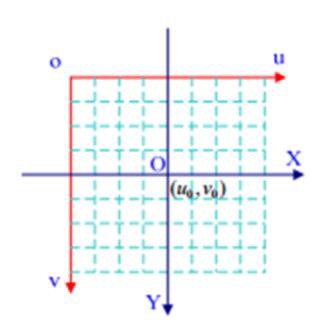
(1)图像像素坐标系(u-v 系)
以图像左上角为原点(Ou),u 轴向右(横向像素列号),v 轴向下(纵向像素行号)。例如,一张 1920×1080 的图像中,右下角像素的坐标为 (u=1919, v=1079)。
像素坐标系的特点是 "离散"—— 每个点对应一个具体的像素,单位是像素(px)。但由于像素是物理传感器上的离散单元,直接使用像素坐标无法反映真实的物理尺寸(如 1 个像素可能对应 1μm 的传感器尺寸),因此需要转换到物理坐标系。
(2)图像物理坐标系(x-y 系)
以图像中心为原点(Ox),x 轴向右(与 u 轴同向),y 轴向下(与 v 轴同向)。其单位是毫米(mm)或米(m),直接对应摄像头传感器的物理尺寸。
从像素坐标系到物理坐标系的转换公式为:\begin{cases} x = (u - u_0) \times p_x \\ y = (v - v_0) \times p_y \end{cases}
其中,u_0, v_0是图像中心点的像素坐标(通常为图像宽高的一半),p_x, p_y是单个像素的物理尺寸(如 5μm/px)。
这一转换的意义在于将 "离散的像素点" 转化为 "连续的物理点",为后续的三维重建提供物理尺度依据。
2.3 相机标定坐标系(CCS):连接图像与三维空间的 "校准枢纽"
相机标定坐标系(CCS)的原点(Oc)位于摄像头的光心(即镜头的光学中心),z 轴指向摄像头的光轴方向(与拍摄方向一致),x、y 轴与图像物理坐标系的 x、y 轴平行。
通过摄像头的内参矩阵(Intrinsic Matrix),可以将图像物理坐标系的 (x, y) 点投影到 CCS 的 (xc, yc, zc) 点。内参矩阵的标准形式为:K = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}
其中,f_x = f/p_x、f_y = f/p_y(f 为摄像头焦距),c_x, c_y是图像中心点的物理坐标(通常为 0,因物理坐标系原点在图像中心)。
这一转换的本质是 "逆投影":已知图像上的一个点,结合摄像头的焦距和像素尺寸,计算其在相机坐标系中的位置(需假设 z 轴深度,这也是单目 3D 感知需要解决的核心问题)。
2.4 车辆坐标系(VCS)与相机坐标系(CCS)的对齐
为了将相机坐标系中的三维点映射到车辆坐标系,Mono3.0 引入了外参矩阵(Extrinsic Matrix),包含旋转矩阵(R)和平移向量(T):\begin{bmatrix} X_v \\ Y_v \\ Z_v \end{bmatrix} = R \times \begin{bmatrix} X_c \\ Y_c \\ Z_c \end{bmatrix} + T
其中,R 描述摄像头相对于车辆的旋转角度(如俯仰角、偏航角),T 描述摄像头光心到车辆原点的平移距离(如前视摄像头通常安装在 windshield 后方,T 的 X 分量为 1.5 米,Y=0,Z=1.2 米)。
外参的标定精度直接影响感知结果的准确性。Mono3.0 采用了在线动态校准技术,通过实时采集车道线、路沿等结构化道路特征,对 R 和 T 进行微调(如车辆载重变化导致摄像头高度变化时),确保长期使用中的坐标对齐精度。
三、工程实践:Mono3.0 如何用坐标系实现精准感知?
以 "前方车辆检测" 为例,Mono3.0 的坐标系转换流程如下:
- 像素坐标→物理坐标:摄像头采集到前方车辆的像素坐标 (u=800, v=600),通过像素尺寸(如 5μm/px)和图像中心坐标(u0=960, v0=540),计算得到物理坐标 (x=(800-960)×5e-6=-8e-4m, y=(600-540)×5e-6=3e-4m);
- 物理坐标→相机坐标:结合内参矩阵(f=25mm),计算相机坐标系下的点:假设车辆在光轴上(zc=10m),则 xc = x×(zc/f) = (-8e-4m)×(10m/0.025m) = -0.32m,yc = y×(zc/f) = 0.12m,zc=10m;
- 相机坐标→车辆坐标:通过外参矩阵(假设 R 为单位矩阵,T=(1.5m, 0, 1.2m)),计算车辆坐标系下的点:Xv=xc+1.5=1.18m,Yv=yc+0=0.12m,Zv=zc+1.2=11.2m;
- 输出结果:前方车辆位于车辆坐标系下 (X=1.18m, Y=0.12m, Z=11.2m),即 "车辆右前方 11.2 米处,横向偏移 0.12 米"。
这一过程中,任何一步的坐标转换误差都会放大感知结果的偏差。例如,外参 T 的 Z 分量误差 0.1m,会导致 zc=10m 时的 Xv 误差 0.1m×(10m/0.025m)=40m(因 xc = x×(zc/f))。因此,Mono3.0 通过以下技术优化精度:
- 多特征联合标定:同时利用棋盘格、车道线、交通标志等特征,提升外参标定的鲁棒性;
- 动态误差补偿:通过 IMU(惯性测量单元)实时监测车辆姿态,补偿因颠簸导致的旋转矩阵 R 的临时变化;
- 深度学习辅助:引入 CNN 网络直接预测目标的深度(z 轴坐标),减少对传统几何转换的依赖(传统方法误差约 10%,Mono3.0 通过学习可降至 5% 以内)。
四、坐标系设计的未来:从局部到全局的智能融合
随着自动驾驶向 L4 级演进,Mono3.0 的坐标系体系正朝着 "全局化"" 动态化 " 方向升级:
- 多传感器坐标系对齐:前视摄像头与激光雷达、毫米波雷达的坐标系需严格统一,Mono3.0 通过时间同步(硬件触发)和空间校准(联合标定),实现多传感器数据在同一 VCS 下的融合;
- 世界坐标系映射:结合 GNSS/IMU 定位模块,将车辆坐标系(VCS)实时映射到世界坐标系,支持车路协同(如接收路侧单元的全局障碍物坐标);
- 动态场景适配:针对自动驾驶中的特殊场景(如车辆转向、上下坡),Mono3.0 引入 "动态坐标系变换",根据车辆的实时姿态(俯仰角、侧倾角)调整 VCS 的轴方向,确保感知结果的一致性。
结语:坐标系是自动驾驶的 "数字地基"
在 Horizon Mono3.0 的前视感知系统中,坐标系不仅是一组数学定义,更是连接传感器数据与自动驾驶决策的 "数字地基"。从像素到物理空间,从相机到车辆,每一次坐标系转换都承载着环境信息的精准传递。随着自动驾驶技术的深化,坐标系设计将不再局限于几何变换,而是与深度学习、多传感器融合等技术深度融合,成为构建 "全场景、全精度" 感知能力的核心竞争力。
对于开发者而言,理解 Mono3.0 的坐标系体系,不仅能更高效地调试感知算法,更能把握自动驾驶技术演进的底层逻辑 —— 毕竟,只有 "位置" 准了,决策才能更聪明。


















 244
244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











