




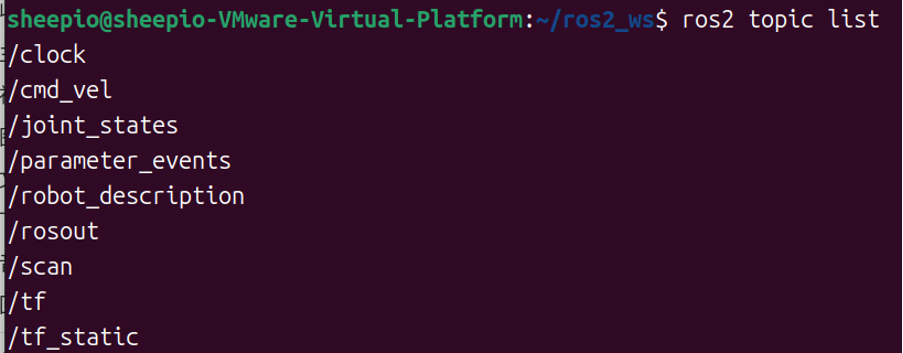
运行程序后,打印话题和节点信息如上,然后查看速度节点具体信息:
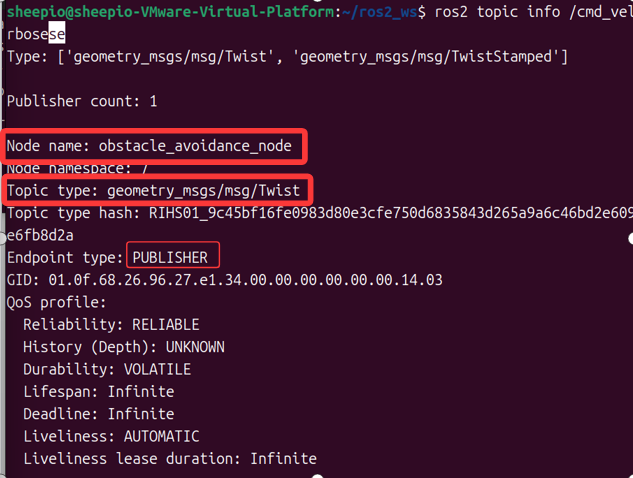
这是一个速度发布节点,发布话题类型为geometry_msgs/msg/Twist;
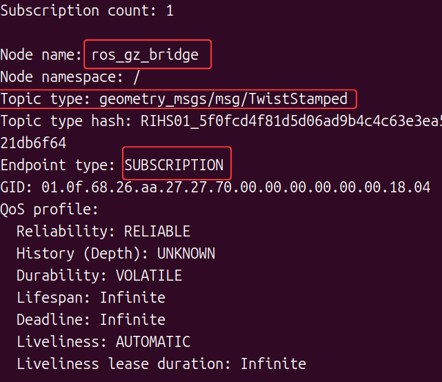
这是一个订阅节点,订阅话题类型为geometry_msgs/msg/TwistStamped。
可以看出,发布节点和订阅节点使用的不是同一个话题,这才导致了/cmd_vel有速度指令,小车却一直不动。这个问题也是找了好久,github上的源代码的问题。
运行程序后,打印话题和节点信息如上,然后查看速度节点具体信息:
这是一个速度发布节点,发布话题类型为geometry_msgs/msg/Twist;
这是一个订阅节点,订阅话题类型为geometry_msgs/msg/TwistStamped。
可以看出,发布节点和订阅节点使用的不是同一个话题,这才导致了/cmd_vel有速度指令,小车却一直不动。这个问题也是找了好久,github上的源代码的问题。
 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























