




问题描述:
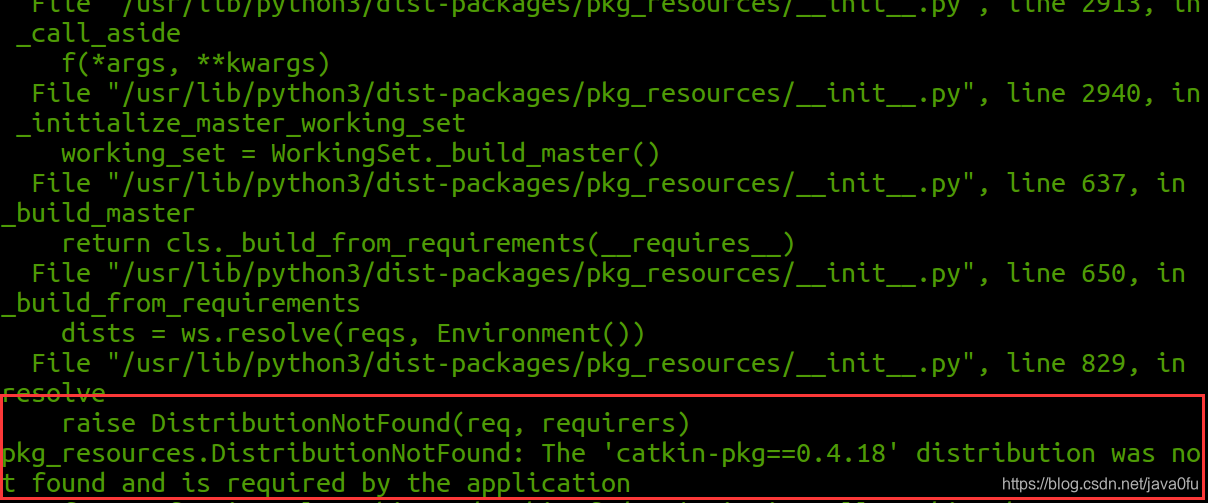
解决方案:
pip install catkin-pkg==0.4.18

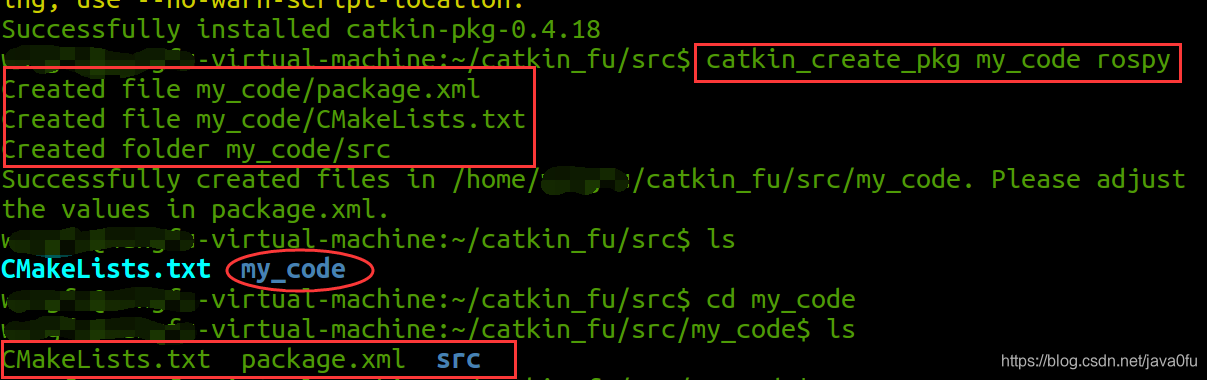
安装完成后便可创建ROS程序包。
 本文介绍如何使用catkin-pkg工具创建ROS程序包,通过指定版本进行安装,确保ROS开发环境的正确配置。
本文介绍如何使用catkin-pkg工具创建ROS程序包,通过指定版本进行安装,确保ROS开发环境的正确配置。
问题描述:
解决方案:
pip install catkin-pkg==0.4.18
安装完成后便可创建ROS程序包。
 6352
3834
5815
5243
2219
2703
1554
6902
854
2568
6352
3834
5815
5243
2219
2703
1554
6902
854
2568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























