




05 描述统计学 Project 分析问卷数据
1.项目概述
本项目是对Udacity的调查问卷进行分析,涉及到两个文件:
- surveydata.xlsl 这个是调研问卷,数据处理和作图在这里。
- survey-project-submission-template.pptx 这个是提交报告的文件,需要提供4页,每一页都有一张图和相关说明。
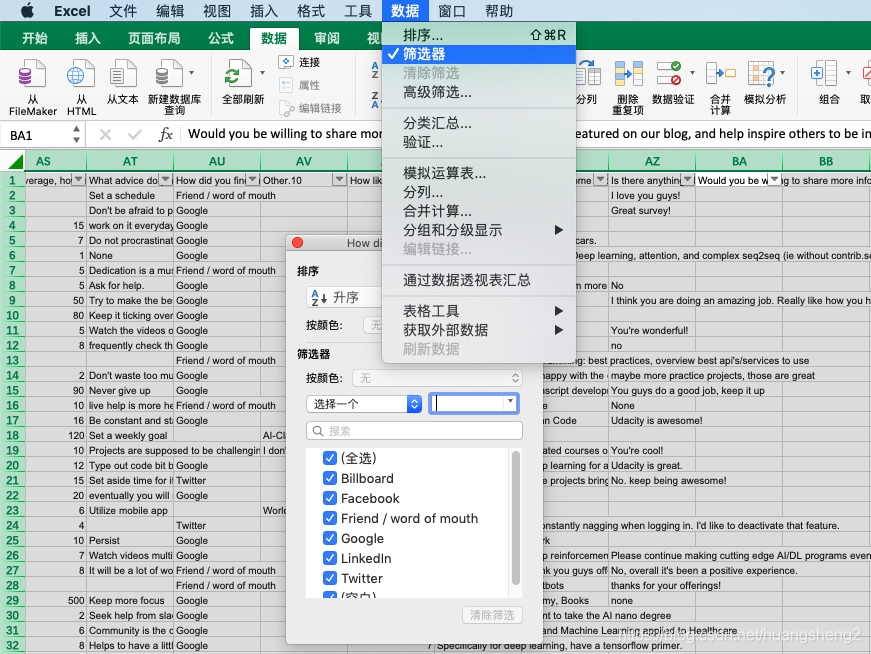
拿到一个数据,第一步是对数据进行观察,可以选中所有列,并开启筛选,这样在点击每一列上面的小箭头的时候,可以看到这列的值都有什么。整体数据有700多行(选中一列,底下的计数就是值的数量):
有的时候数据会有数据字典,解释每个数据列的作用。这个数据没有,那么我们怎么办呢,我给个建议:使劲看!开玩笑了,其实拿到数据进行浏览,理解数据的feature都是啥非常重要,而一般来讲,第一行的表头是这列的说明:
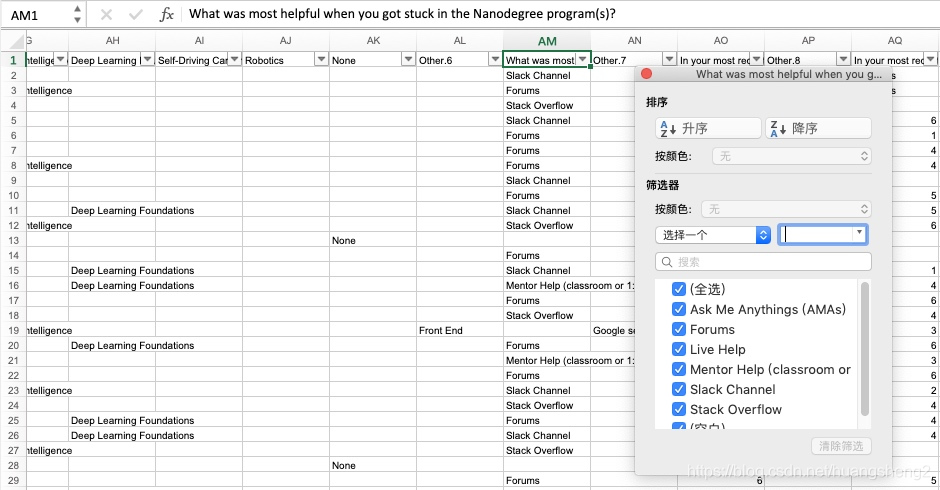
比如说像上面AM列的例子,表头是 What was most helpful when you got stuck in the Nanodegree programs(s) 问的是当卡住时,最能帮助你的是什么。可以推断出,表头的信息就是调研问卷中的内容了,比如论坛啊、导师帮助啊(弹出的列表框)。
另外,在我开始看的时候, 像 A-F 这几列确实开始摸不着头脑:
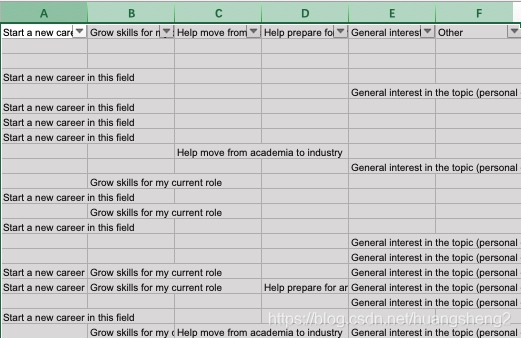
列明和内容完全一样,而且有6
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 684
684

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









