




04 描述统计学 Lesson6 电子表格4:可视化数据
文章目录
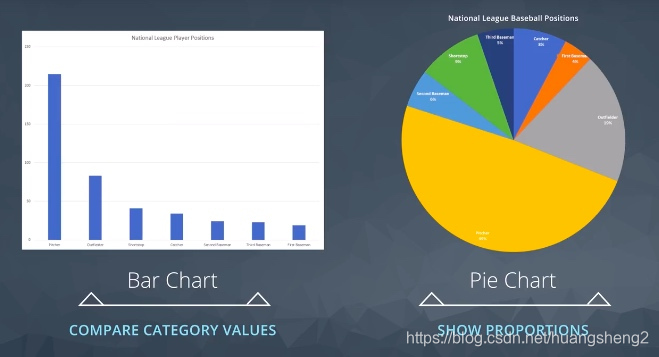
2.饼图
饼图的作用是高速听众每个位置在总体中所占的百分比(而且饼图和我们的日常生活经验十分接近,吃Pizza的感觉有没有),而且在 Excel 中十分方便(见视频):
- 选中数据区域
- 选中图形方式为饼图
- 等图形生成以后选择图形样式
- (如果样式不能满足,也可以细微调整,选项很多大家自己探索)
视频1:35处开始的技巧提示:
- 按住contrl(Mac系统 command)可以选择两个不相邻的行。
- 在目标位置control-v(Mac系统 command-v)则会粘贴在一起,非常方便。
- 粘贴之后,在粘贴的位置会出现一个小的“剪切板”,点击可以有丰富的选项(比如将粘贴的两行转为两列的转置功能)。
3.练习:饼图
这里的的 Checklist 第三项:在”数据透视表“页面上,将 GICS Sector 字段设为行,**每行为股票数。**是说把“Ticket Symbol“设定为值的意思(拖动到值那里就可以了)。
如果使用的是 Mac Office 2016 的话,插入图表要在顶层菜单“插入”-“图表”-“饼图”生成。生成后通过“图表设计”选择样式。注意“快速布局”无法打开,如果想要修改,可以把文件传到微云上,在网页(Office365)操作相关内容。如果为了得出答案那就不必了。
4.柱形图
相比饼图显示比例,条形图可以更好的显示不同类别的值是多少:
5.散点图和折线图
如果我们拥有和时间相关的数据集,可以使用折线图来展示,可以看出数据随着时间变化的趋势(比如股票价格)。
Tips:
- 如果选中了多列数据,则会得到多条颜色不同的线
- 可以通过调整图形显示的起始y坐标来让图形更加容易观察(见下图左右对比):

散点图则是把两个不同类别的数值作为一个点的x值和y值画到坐标系中。当当大量的点画到坐标系之后,我们就可以看到这些点的趋势,也就可以判断出作为x值和
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









