



1. 安装驱动(以下驱动包中包含一个上位机PCAN-View)
从官网直接下载:Device Driver Setup: PEAK-System
2. 安装后的上位机如下显示
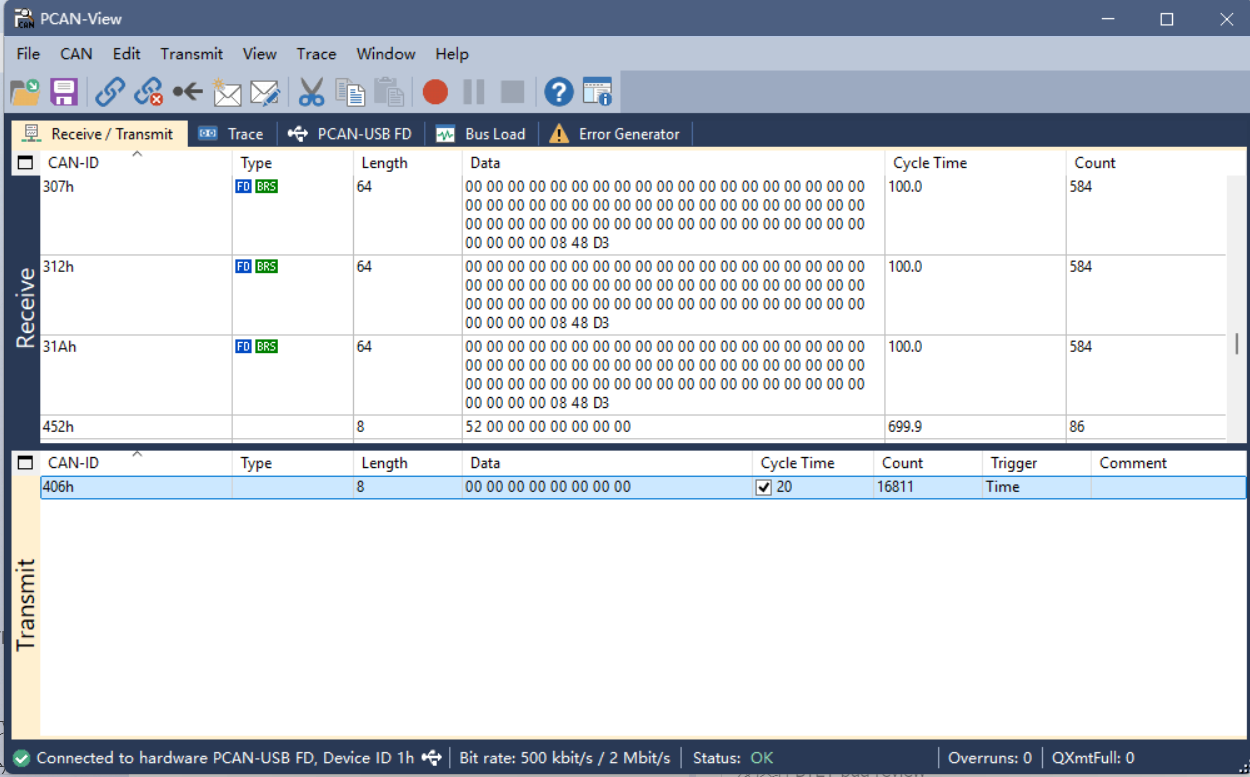
3. 上位机的使用和其他上位机差不多,发送NM帧后唤醒了控制器后界面就如下显示了
1. 安装驱动(以下驱动包中包含一个上位机PCAN-View)
从官网直接下载:Device Driver Setup: PEAK-System
2. 安装后的上位机如下显示
3. 上位机的使用和其他上位机差不多,发送NM帧后唤醒了控制器后界面就如下显示了

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 7750
7750





