



1.本平台是tju北洋动力车队的无人驾驶方程式赛车的仿真环境搭建的教程,以及各部分算法原理的解析,尽量用最简单通俗的方式,让大家在仿真环境中跑车,有这样的平台,对算法的迭代将是完全不一样的效果。
2.本平台需要具备ROS基础、python基础、c++基础、Linux基础,至少需要能够看得懂程序,如果看不懂的地方请先学习一下语法。很多同学遇到的问题都是因为对ROS,对Linux缺乏了解,工欲善其事必先利其器,学好ROS是做好仿真的前提。
3.遇到问题无法解决时可以联系我们,欢迎交流。wx:cyun_weid5355
相关教程请观看视频学习。
相关资料请前往视频评论区留言
无人驾驶方程式赛车:GAZEBO建模,Linux操作系统与ROS环境搭建指南、ROS环境配置与模型编辑、三维模型操作与仿真环境启动指南、测试环境变量
无人驾驶方程式赛车:GAZEBO建模方法手把手(下):创建自定义URDF、车辆仿真与关节状态发布、机器人运动与传感器应用、阿克曼转向模型
无人驾驶赛车:在GAZEBO中做无人驾驶的定位建图、感知、规划及控制,ORIEN域控制器-CAN通信,以太网,等
立意
从实车到仿真or从仿真到实车
无人驾驶方程式中,仿真和实车测试肯定是贯穿算法/软件开发始终的。我们做实验,最重要的就是要有数据,数据从哪里来?
激光雷达、相机、gps、imu、车轮转交、油门开度、刹车量…
我们当然可以通过实际的传感器获取这些数据,通过实车上的物理传感器直接采集数据,数据也不可避免的会有噪声,会有干扰,会有误差。
我们也可以通过仿真生成数据,通过编写函数(Python)或使用仿真工具(如 Gazebo),模拟传感器输出,生成符合预期规律的数据。模仿实车给出输出数据,也不失为一种有效的方法。
在无人驾驶开发中,仿真与实车测试的重要性可视为“三七分”——仿真占主导(70%),但实车测试(30%)不可或缺。仿真能够加速算法开发、降低成本,而实车测试则是验证算法鲁棒性和实际效果的关键。成功的开发需要:
1.实车经验:通过实车测试积累数据,分析数据规律(如传感器噪声分布、车辆动态响应),为仿真模型提供参考。
2.仿真定型:利用仿真快速实现算法功能,验证感知、规划和控制模块的可行性,缩短开发周期。
内容概述
这里主要是介绍的是无人车综合算法,因为题目比较宽泛,所以我主要是讲述怎么做仿真,一是怎么搭建仿真环境,一个是怎么开发能用于实车的算法。这里我们采用的环境是ros+gazebo的路线,从零搭建一个无人方程式赛车,然后开发算法来控制它。
我呢,准备了两个大的部分,一个部分是仿真与算法,另一个部分是域控制器与通信入门.
1.仿真与算法开发:介绍如何基于 ROS 和 Gazebo 搭建仿真环境,并开发可迁移到实车的算法。
2.域控制器与通信入门:探讨域控制器的接口以及常见的通信架构的原理与实现。
快速体验
车辆仿真的功能包主要在car_model中,里面的三个luanch文件对应的是相应的仿真启动文件
高速循迹
roslaunch car_model highspeed_tracking.launch
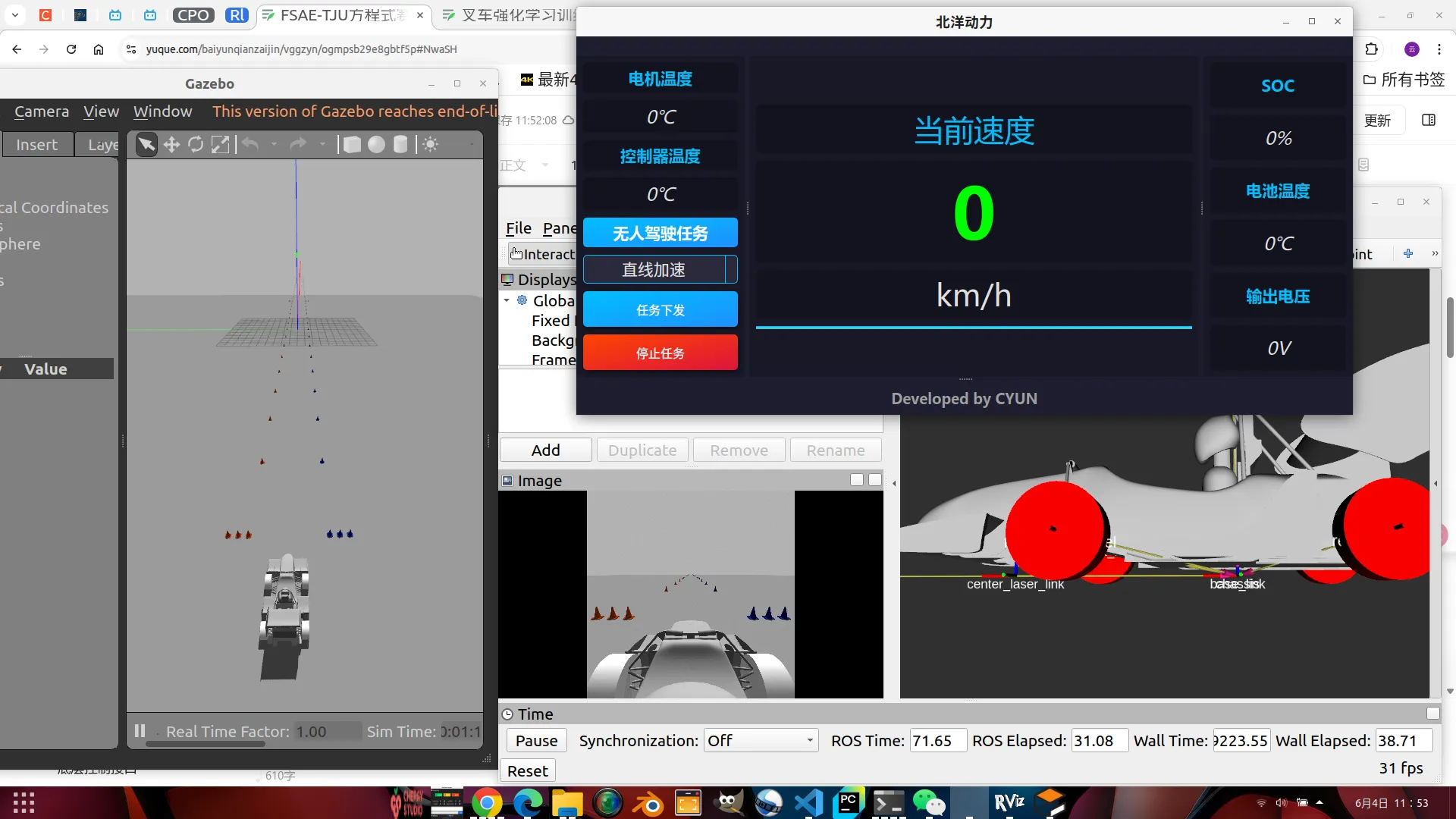
rviz+gazebo+hmi
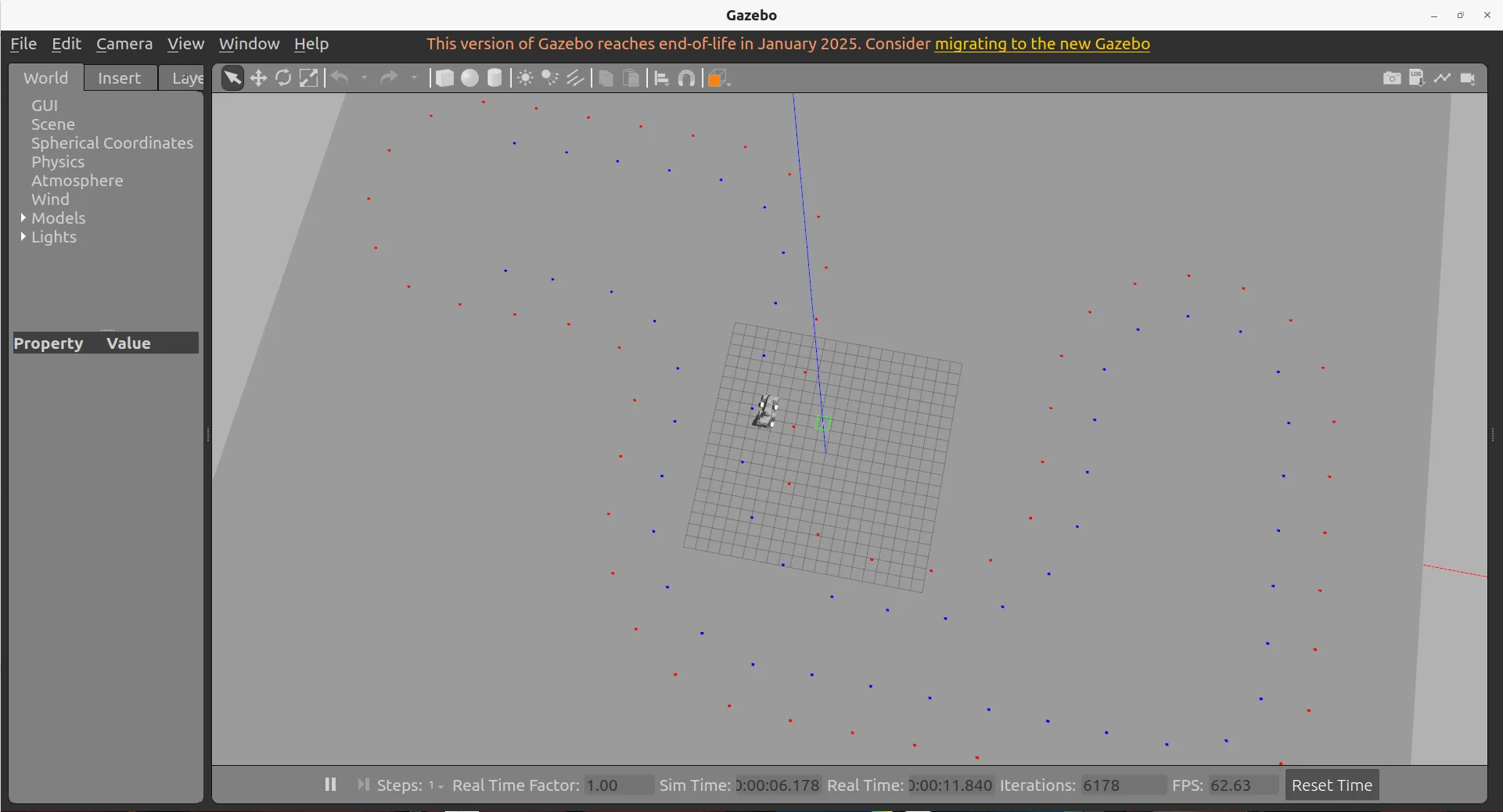
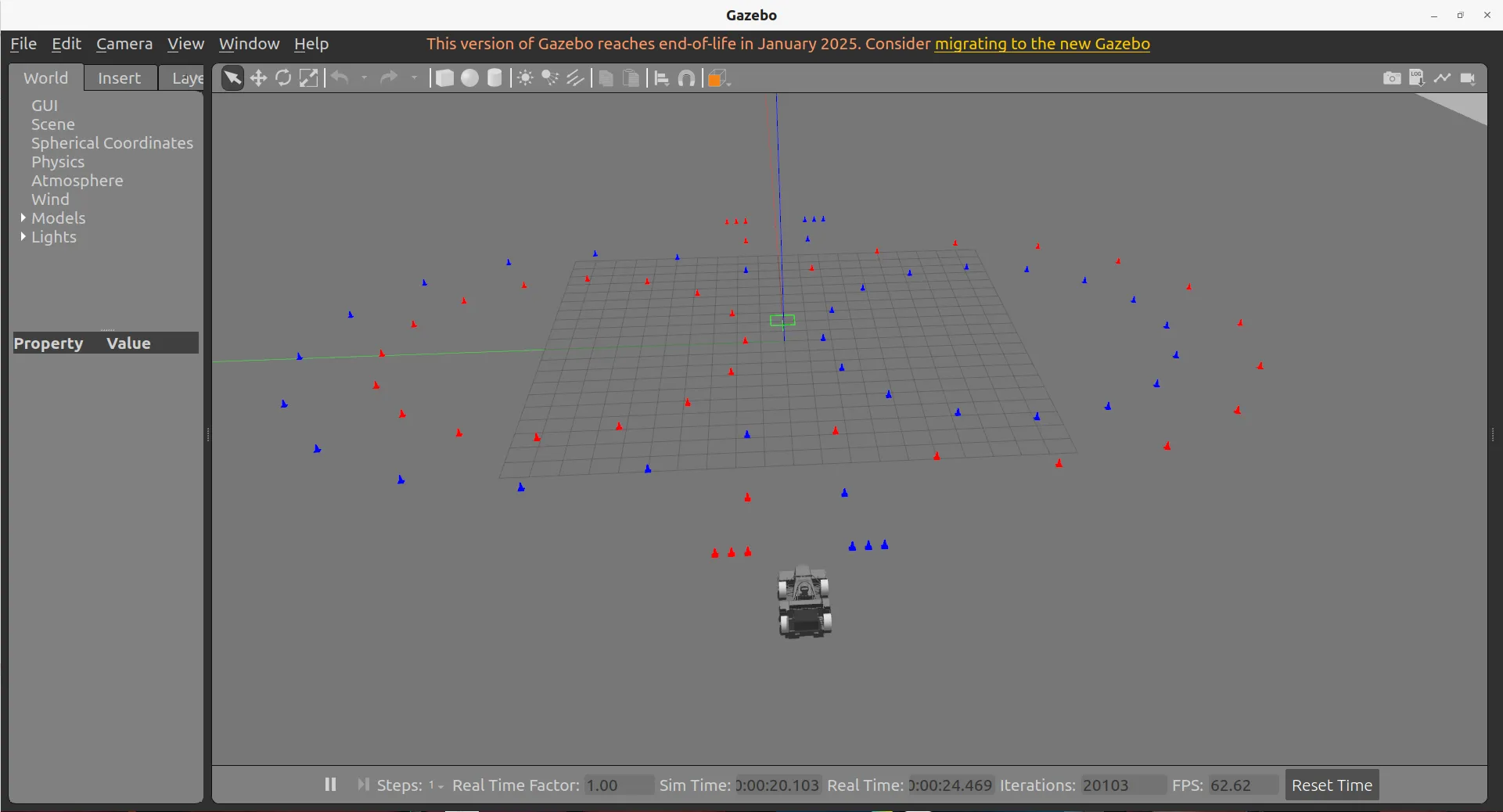
八字绕环
roslaunch car_model circle.launch
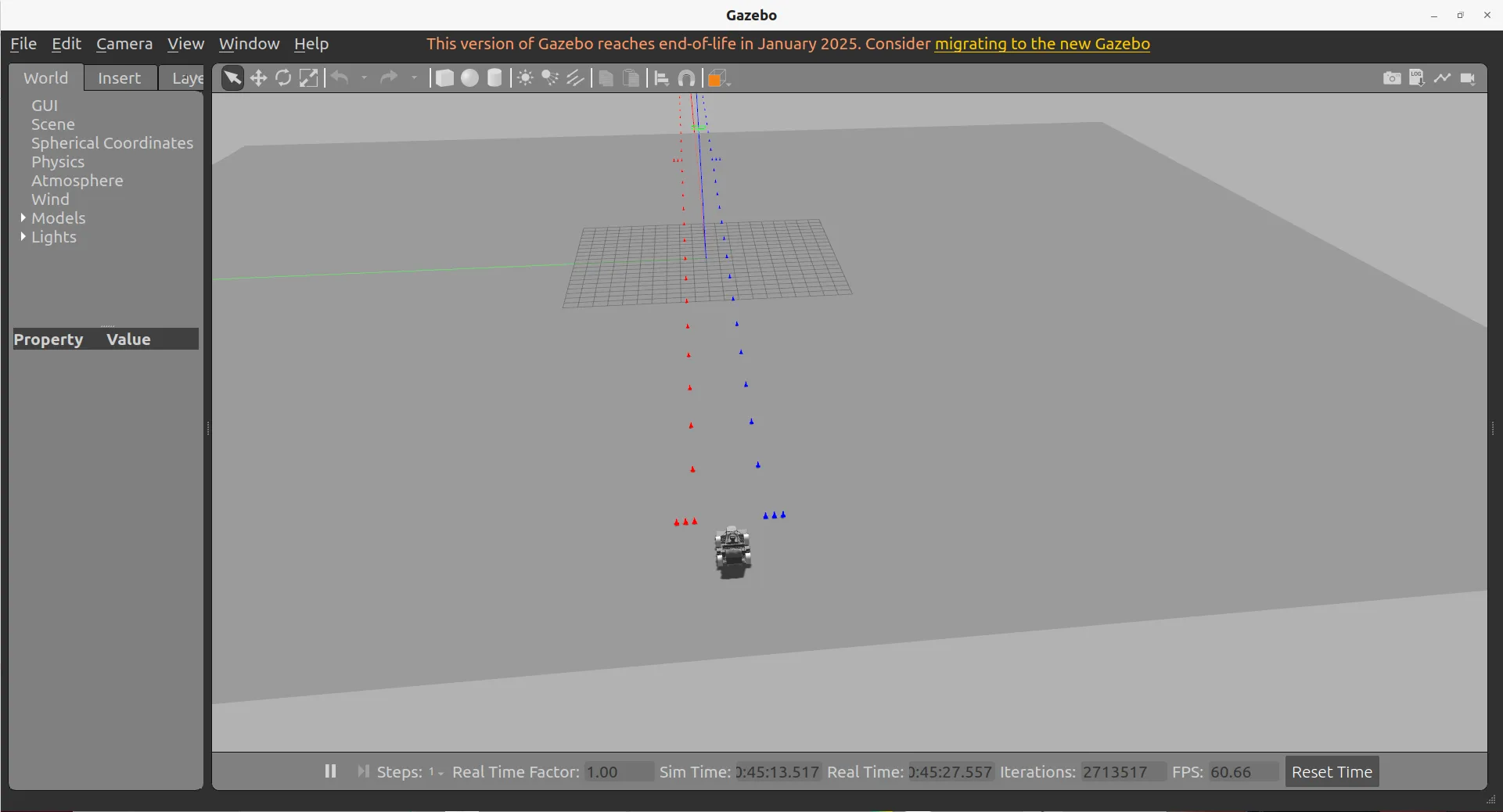
直线加速
roslaunch car_model acceleration.launch
启动了仿真环境之后,启动键盘控制来发布控制信号:
1.首先安装工具ros-noetic-teleop-twist-keyboard
sudo apt install ros-noetic-teleop-twist-keyboard
启动仿真环境
3.启动键盘控制
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
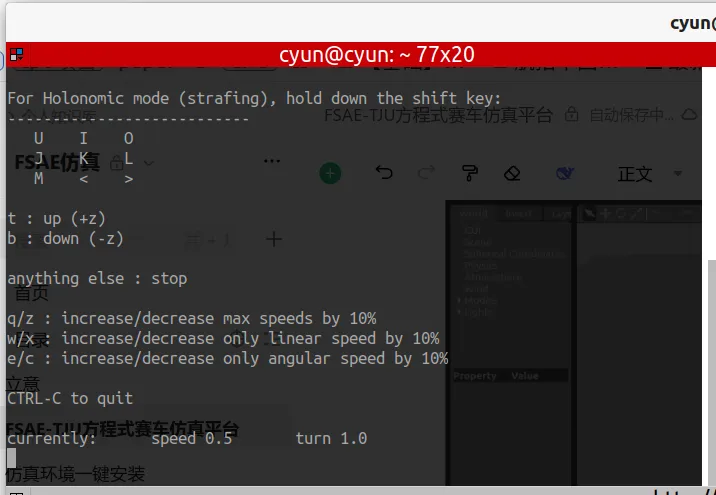
w/x控制线速度的增减
e/c控制角速度的增减.
我们这里的控制是使用阿克曼转向,使用cmd_vel中的线速度代表速度,角速度代表转角.
如果觉得有用,就请支持一下吧


















 447
447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











