




1.创建工作空间
2.创建功能包
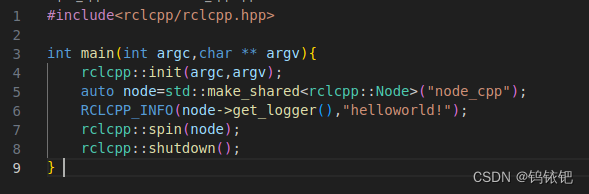
3.编写c++文件
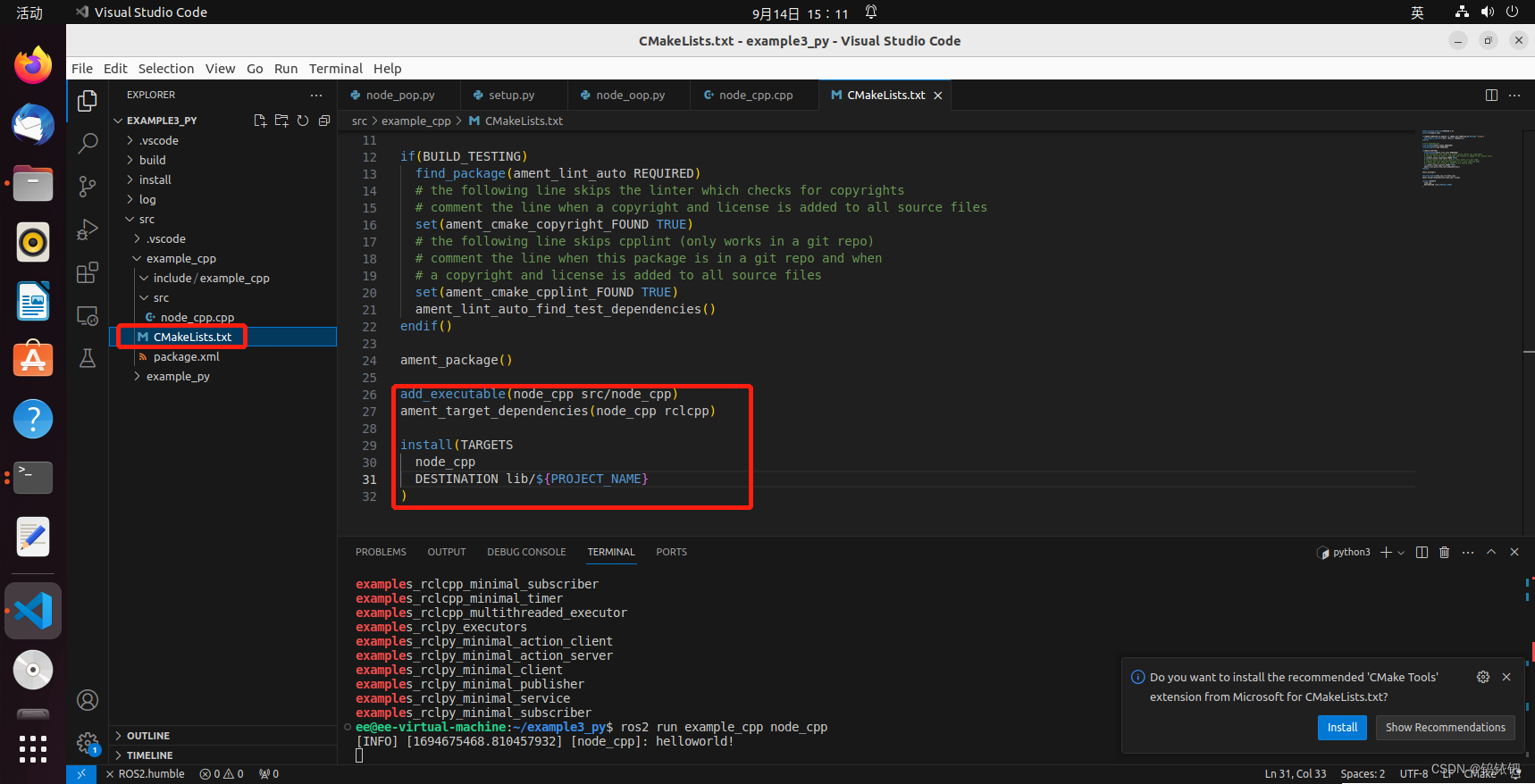
4.在CMakeList.txt添加代码
5.colcon build --package-select +包的名字

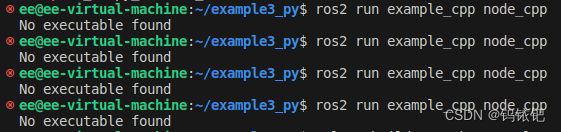
(要记得保存.cpp和CMakeList.txt再编译,否则会导致运行失败,出现下面这种情况👇)
6.先source让电脑知道这个包的路径
再list查看是否成功创建这个包

7.run运行
![]()
 本文指导如何在ROS2环境中从创建工作空间开始,逐步创建功能包,编写C++代码,配置CMakeList.txt,使用colcon进行编译和运行,适合初学者跟随实践。
本文指导如何在ROS2环境中从创建工作空间开始,逐步创建功能包,编写C++代码,配置CMakeList.txt,使用colcon进行编译和运行,适合初学者跟随实践。
(要记得保存.cpp和CMakeList.txt再编译,否则会导致运行失败,出现下面这种情况👇)
再list查看是否成功创建这个包
![]()
 3686
1299
389
3686
1299
389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























